|
|
Wij maken gebruik van de "pneumatic climbing robot" van Ronald Van Ham. Het is niet belangrijk te weten wat er juist in de PIC van de robot gebeurt, daar het
enkel de in en outputs zijn die ons interesseren. Het enige wat we nodig hebben zijn de mogelijke bitcombinaties veroorzaakt door de verschillende bewegingen.
Door één actie met de joystick wordt een sequentie van voorgaande bewegingen uitgevoerd. Een eventuele botsing kan de volgorde van deze sequentie veranderen. Als input voor onze noten nemen we de uitgang van de "robot PIC", die tevens de kleppen aansturen. Dit doen we omdat een beweging met de joystick vele klepsturingen tot gevolg kan hebben, en er dus meer noten kunnen gespeeld worden.
De gebruikte "Midisport 1x1" werd voor ons aangekocht. Deze verzorgt de communicatie tussen onze PIC en de PC. Het midi protocol kan worden teruggevonden op http://www.borg.com/~jglatt/ Wij maken enkel gebruik van de volgende basis commando's.
Vooreerst dient er gezegd te worden dat een noot bestaat uit drie bytes, namelijk één
statusbyte gevolgd door twee databytes. Respectievelijk een channel (1 tot 16), een
nootnummer (0 tot 127) en een velocity/luidheid (0 tot 127).
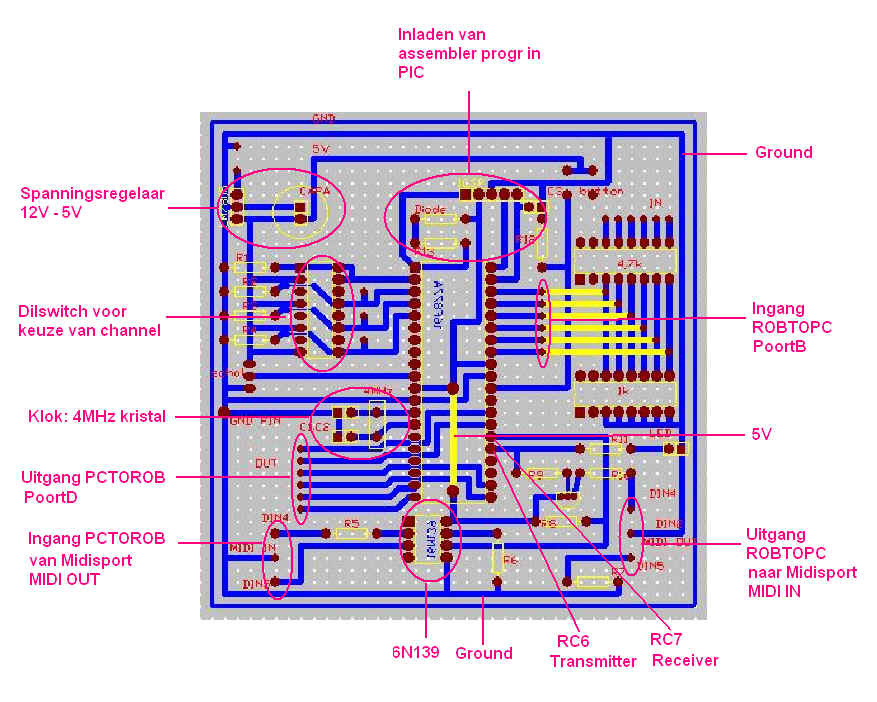
Het electronisch schema werd getekend in Traxmaker. Voor het bedenken van de schakeling hebben we inspiratie gezocht op het internet. De volgende site : Site over hoe Midi en PIC combineren heeft ons hierbij behoorlijk geholpen.
Op "Ingang PCTOROB" wordt Midisport MIDI OUT aangesloten. Door in Max een
noot te spelen, worden er drie bytes naar onze Pic gestuurd. Dankzij ons programma gaan we
dan zo de robot aansturen door "Uitgang PCTOROB" op de robot aan te sluiten in
plaats van de joystick. FOTO ONS BORDJE EN VERBINDINGEN MET ROBOT
|