This website will give you a concise overview of our project of Mechatronics.
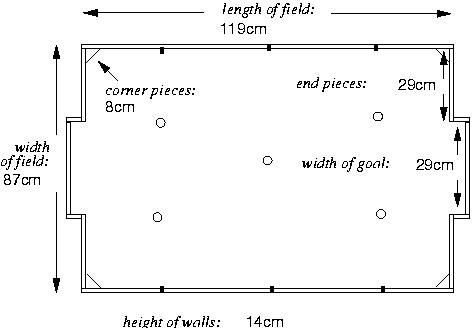
Our task was to build a robot for the football department of the RoboCup Junior robot competition. The game is being played one-on-one with a ball which transmits IR-rays. The field is covered with a gray gradient from white to black. This makes it possible to determine the position and the orientation of the robot on the field by using three lightsensors (we sometimes call them graysensors). Distancesensors (we sometimes call them sharpsensors) are used to detect the sides of the field. Using a push button, we can set whether the goal of the opponent is in the black or the white part of the field. A switch is used to start or stop the robot on command of the adjudicator.
Figure: Ball |
|
Other rules can be downloaded via: http://www.robocupcn.org/en/league_sub.php?subleague=Junior%20Soccer#article90
Making the robot wasn't something that went smooth and simple, first we took some time to understand the task and to find information about similar robots. Later on we divided the project in different parts: Sensors, Traxmaker, Assembler and Inventor. Information about these parts you can find in the other tabs.
The problems we dealt with are also putted on the website, so in case if anyone of you tries to make a robot as well, you won't make the same mistakes we did!
At last we presented the robot at the Robocup in Technopolis, Mechelen. A few pictures and videos are placed to show you the results.
We hope you'll like the site and maybe learn something too!
Joris, Koen, Sam and Yves