Jaaropdracht
 Vermits mechatronica het kunnen integreren van heel
wat disciplines is, ligt het zwaartepunt van de cursus op het verwezenlijken
van de eindopdracht. De opdracht bestaat erin een robot te bouwen voor de
voetbal afdeling van de RoboCup Junior robotwedstrijd.
Vermits mechatronica het kunnen integreren van heel
wat disciplines is, ligt het zwaartepunt van de cursus op het verwezenlijken
van de eindopdracht. De opdracht bestaat erin een robot te bouwen voor de
voetbal afdeling van de RoboCup Junior robotwedstrijd.
Wat is RoboCup?
RoboCup
is een internationaal initiatief om robotica en kunstmatige intelligentie te
promoten en is opgericht in 1993. Het heeft als doelstelling om in 2050 een
team voetballende robots klaar te hebben dat kan winnen tegen de dan heersende
wereldkampioen. Om zulke team robots te ontwikkelen zijn er heel wat
technologieën die gecombineerd moeten worden. Aan deze wedstrijd wordt dan ook
deelgenomen door gerenommeerde onderzoeksinstellingen en universiteiten. Er
bestaan verschillende competities zoals humanoid league, standard platform
league, middle size, small size,...



Wat is RoboCup Junior?
RoboCup
Junior is een robotwedstrijd voor het lager en voortgezet onderwijs dat
georganiseerd wordt in 28 landen, waarronder ook België (www.robocupjunior.be).
Er zijn drie disciplines: dansende robots, reddingsrobots en voetballende
robots (in stijgende volgorde van moeilijkheidsgraad). De keuze van robot is
vrij zollang het binnen de reglementering valt. Meestal wordt gebruik gemaakt
van commerciele pakketten als LEGO Mindstorms NXT.
Opdracht
De
opdracht van dit jaar is dat jullie zelf een voetballende robot bouwen en
programmeren. Op 16 mei vindt de finale plaats in het wetenschapsmuseum
Technopolis waar jullie een demonstratiematch moeten geven. Waarschijnlijk zullen
er verschillende media aanwezig zijn zoals Ketnet en heel wat toeschouwers
waarvoor jullie hopelijk impressionante robots kunnen tonen.



De
voetbalwedstrijd wordt 1 tegen 1 gespeeld met een bal die IR straling uitzendt.
Er wordt gespeeld op een veld met afmetingen waarvan de ondergrond een
grijsgradiënt heeft van wit naar zwart. Hierdoor is het mogelijk de positie en
oriëntatie van de robot op het veld te bepalen met 3 lichtsensoren. Schakelaars
langs de omtrek moeten de rechtopstaande wanden van het speelveld detecteren.
Via een schakelaar moet instelbaar zijn of het witte of zwarte deel de
thuisgoal is. Via een drukschakelaar moet de teamleider de robot kunnen starten
en stoppen op commando van de scheidsrechter. Voor de wedstrijd zal er tijd
beschikbaar zijn om de sensoren te kalibreren indien dit nodig wordt geacht
door het team. De robot moet echter gestart worden na volledige uitschakeling
van de batterij. Verdere regels die onder andere de maximale afmetingen van de robot
vastleggen, staan uitgelegd in de officiële spelregels die te downloaden zijn
via:
http://www.robocup-cn.org/en/league_sub.php?subleague=Junior%20Soccer#article90.
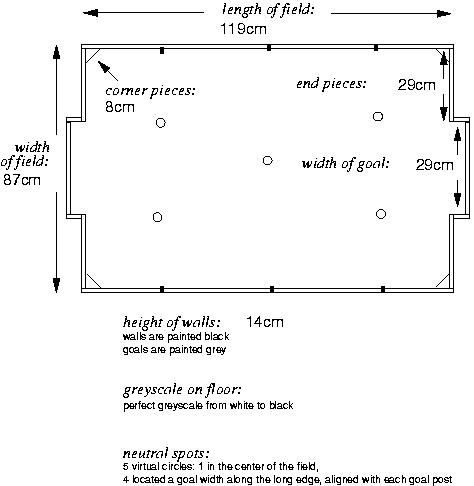
Afmetingen
speelveld

IR
speelbal
Beschikbare componenten
Voor
de realisatie krijgen jullie volgende componenten:
- PIC microcontroller
- Dual H-bridge
- 2 DC elektromotoren met tandwielkast
- Schakelaars en lichtsensoren moeten zelf gekozen
worden uit RS catalogus (www.rs-components.be).
1
knipperende LED moet aantonen dat het programma nog loopt en niet is
vastgelopen.
Een
aantal controleLEDs moeten zelf gekozen worden.
Andere
componenten dienen besproken te worden met Kristof of Jean-Paul.
 De PIC controller en elektronica moeten gesoldeerd worden
op een zelf ontworpen eenzijdige printplaat (PCB). Hou rekening met de maximale
toegelaten afmetingen van de robot. De software Traxmaker is beschikbaar om de
printplaat te designen.
De PIC controller en elektronica moeten gesoldeerd worden
op een zelf ontworpen eenzijdige printplaat (PCB). Hou rekening met de maximale
toegelaten afmetingen van de robot. De software Traxmaker is beschikbaar om de
printplaat te designen.
De
structuur van de robot moet gedesigned worden in Inventor en afgedrukt worden
met de 3D printer (Rapid Prototyping machine). De plastiek moet versterkt
worden met standaard aluminium profielen.
Deliverables
22 april:
Aantonen minimumvereisten robot. Elektronica gebouwd op breadboards. Er moeten
APARTE programma's geprogrammeerd worden die de INDIVIDUELE werking van de
verschillende sensoren (schakelaar, IR en lichtsensor) aantonen en actuatoren
(led en H-brug) kunnen aansturen.
29 april:
laatste dag inlevering lay-out printplaat aan Kristof. Hij zal de printplaat
nakijken en goedkeuren voor fabricage door Jean-Paul. Hou rekening met minstens
1 week fabricagetijd. Hou er ook rekening mee dat bepaalde elektronische
componenten niet in voorraad zijn en tijdig dienen besteld te worden.
29 april:
Inleveren van de CAD-file van de structuur van de robot. Na goedkeuren kunnen
de componenten gefabriceerd worden. Hou rekening met 1 week fabricagetijd.
16 mei:
Finale in Technopolis Mechelen
29 mei:
verslag is een website waarin de schema's, printlayout en programma staat
beschreven. De website liefst in het Engels zodanig dat een zo breed mogelijk
publiek de website kan raadplegen.
Het
eindexamen bestaat erin de robot en verslag te bespreken. Hierbij zullen
aspecten uit de cursus aan bod komen. Een goede beheersing van het vak mechatronica
zal vooral blijken uit het goed verwezenlijken en begrijpen van de robot.
Puntenverdeling practica (totaal op 20)
-
printplaat (3 punten): wordt onder andere gekeken naar compactheid, aantal
fouten in schema, halen deadline,...
- CAD
file (2 punten): wordt onder andere gekeken naar hoeveel materiaal nodig is
voor de realisatie (kostprijs is ongeveer 1 € per kubieke cm), stevigheid,
integratie van sensoren en actuatoren in de structuur, halen deadline,...
-
groepswerk (4 punten) wordt gekeken hoe zelfstandig de groep gewerkt heeft en hoe
de groep probleem efficiënt heeft aangepakt.
-
Aantonen van de minimumvereisten programma op deadline (2 punten).
-
programmeerwerk (5 punten) er wordt gekeken naar efficiëntie van programma, de
schema's van de programma's en begrijpbaarheid van de commentaar in de source
code.
-
prestatie robot finale (4 punten) De algemene prestatie van de robot wordt
beoordeeld. Hoe zijn de sensoren, microprocessor en actuatoren op een
efficiente manier geïntegreerd.
De
quotatie gebeurt per groep, tenzij de begeleiders menen dat er een duidelijk
onderscheid is in de inzet en prestaties binnen een groep.
Groepenindeling
De
projecten worden in groepen van 3 personen uitgevoerd, zelf te kiezen.
Internet en voorbeeldcode
Belangrijkste
is de efficiënte werking van de robot verwezenlijken en het goed begrijpen van
de werking ervan. Het wordt aangemoedigd om op het internet en in andere
bronnen op zoek te gaan naar informatie zoals source code en elektronische
schema's. De source code van reeds verschillende jaren mechatronica projecten
staan op http://mech.vub.ac.be/teaching/info/mechatronica/Finished.htm.
Als
raad wordt meegegeven dat je best tijdig aan het project begint omdat elk
project zijn specifieke hindernissen heeft.