Vrije Universiteit Brussel
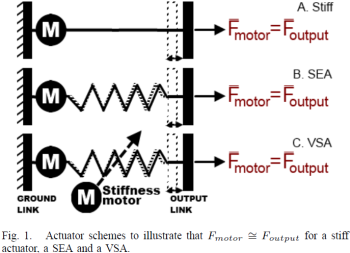
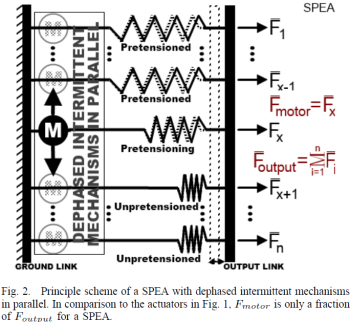
Series-Parallel Elastic Actuation (SPEA)IntroductionFor applications with many degrees of freedom, lightweight and compact designs with high torque requirements (e.g. exoskeletons, humanoids, agile locomotion, prostheses, manipulators) the current actuation technology is insufficient. Variable Impedance Actuators (VIAs) are being developed to bring bio-inspiration into mechanical systems to extend the possibilities of traditional stiff actuation and improve the requirements regarding safety and energy efficiency. Most of the developed actuators consist or can be modeled as a series arrangement of a motor controlling the equilibrium and a spring of which the stiffness can be mechanically controlled. Disadvantage of this series arrangement is that all the torque generated by the joint, also needs to be generated by the (electric) motor, as shown in Fig.1. Parallel springs are already deployed to reduce the torque requirements of the motor, but in these designs the parallel stiffness is fixed in the design. In this paper a novel actuator is presented containing series and parallel elastic elements where the engagement of the parallel springs can be actively controlled. Therefore we call this novel category of actuators Series-Parallel Elastic Actuators (SPEA). Main inspiration source here is a biological muscle that consists of a large set of parallel and series muscle fibers. The difference is that not all parallel springs in the SPEA need to have their own force converter (mostly electrical motor), but are tensioned by an intermittent mechanism actuated by a single motor.
Concept
The Series-Parallel Elastic Actuator (SPEA) consists of
a bundle of parallel compliant elements, for which every
compliant element can be contracted one after the other. A
single spring can be in three phases as shown in the lower
part of figure 1.
The problem is then brought back to developing an intermittent mechanism that with a single motor can achieve the springs to be in one of the three phases. This novel idea drastically reduces the torque requirements of the motor and increases the energy efficiency since it features variable load cancellation and selective spring recruitment and locking.
MoviesPublicationsC: articles in scientific journals with an international referee system
I1: communications at international congresses / symposia integrally published in proceedings
I2: communications at international congresses / symposia not published or only available as an abstract
More infoMore info about this actuator and its applications can be obtained from Glenn Mathijssen (email), Raphael Furnemont (email) and Bram Vanderborght (email). Up |
©2019 • Vrije Universiteit Brussel • Dept. MECH • Pleinlaan 2 • 1050 Elsene
• Tel.: +32-2-629.28.06 • Fax: +32-2-629.28.65 • webmaster