The Elevator
A mechatronics project
Here you can find
information about the used electronics and their implementation in the
project.
Microcontroller
The microcontroller is the heart of the electronic circuit. Ours was a PIC16F876A of Microchip. A block diagram of the controller: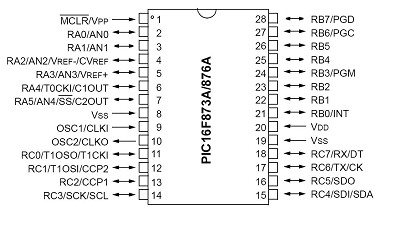
These are the basic components that the controller needs. A reset function can be added in order to restart the program when the controller ceases to respond or is not reacting properly. A MCLR pin of the microcontroller is provided for this reason. It is an active low pin; the reset will happen if the pin is low. A circuit to manually reset can be designed as:
More information about this CHIP can be found in this dutch document or in the datasheet.
Shift Register
Because the number of inputs in the PIC is limited we chose to use a shift register to read out the status of each button. As shift register we chose for the HC597.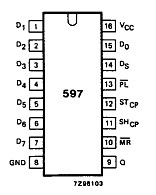
In order to read out this buttons a procedure must be followed.
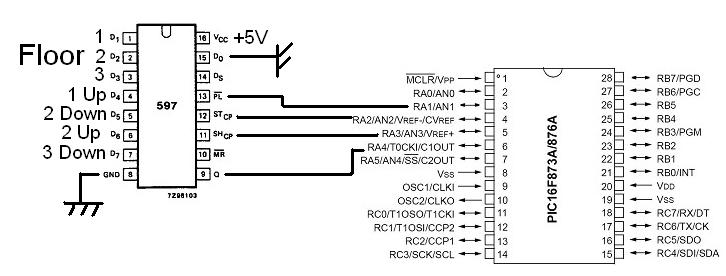
The pic is connected to the shift registers as followed
| Q | PinA,4 |
| SHcp | PinA,3 |
| STcp | PinA,2 |
| PL | PinA,1 |
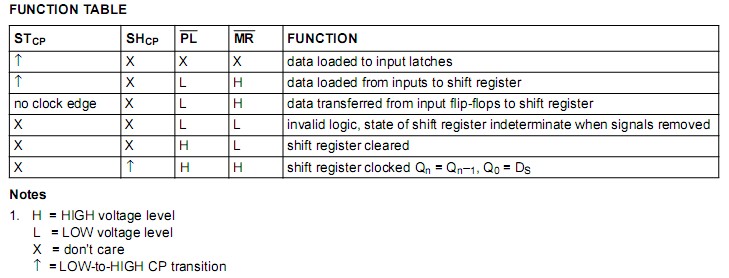
First the status of al the buttons must be transferred from the pin to the input latches. This is done by setting a rising flank on STcp. Then pin PL is set low to transfer the status from the input latches to the input flipflops. Afterwards this pin is set high again.
Now the value of D7 is given at the exit Q of the shift register. The pic reads this value and if we now send a rising edge to SHcp the next value is given (D6) this is repeated 6 times to get all the statusses of the input buttons.
An overview flowchart of how de shift register was used is given below:
Motor Drive Chip
The motor that feeds our elevator needs to be controlled in sense and speed of rotation.
A possibility would be to directly feed the motor by the microcontroller. However, the latter is limited to 25 mA output current. A few tests on the motor revealed that larger currents up to a few hundred mA could be possible during service. Thus, a current amplification device is needed between microcontroller and motor terminals.
An interesting possibility is the use of an H-bridge to accomplish this. The two basic states of the H-bridge are shown below.
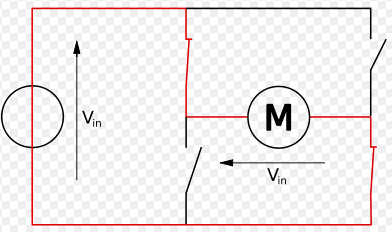
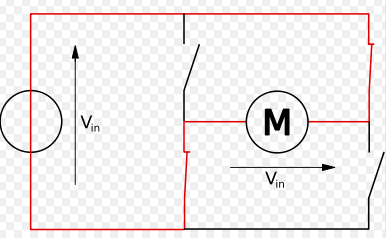
Four switches allow the motor to be run backwards or forwards. When the switches S1 and S4 (left up and right down) are closed (and S2 and S3 are open (left down and right up) )) a positive voltage will be applied across the motor. By opening S1 and S4 switches and closing S2 and S3 switches, this voltage is reversed, allowing reverse operation of the motor.
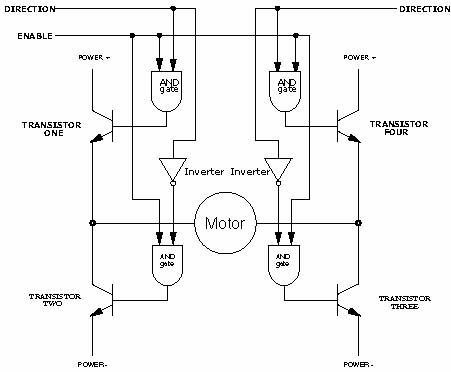
Thus, this electronic circuit can be built with some transistors and inverters. Although possible, this would be quite time-consuming. Luckily, these kind of circuits already exist as integrated circuits and are commercially available. An example of such a motor driver chip is the L293b. It is capable of delivering 1A continuosly and 2A non repititve, which is satisfactory for our configuration.
The circuit with the motor driver chip and the microcontroller looks like this: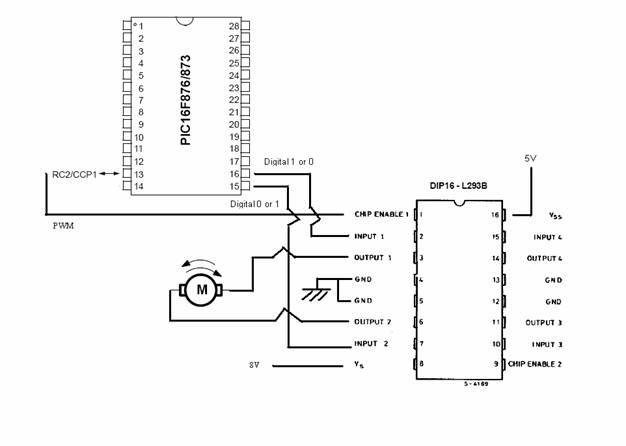
De thruth table:
Experimentally, it was noticed that the chopped voltage at the enable input needed to be at least three volts in order to slowly move the lift. Therefore, as you can verify in the code, the duty cycle during the variable speed regulation was limited to a certain minimal value during braking.
Back
Analog to Digital conversion
Fortunately, the microcontroller has a ADC built in. The analogue signal charges a sample and hold capacitor. The converter then generates a 10-bit digital number via successive approximation. The value of the most significant bit is determined by whether the input signal is in the upper or lower half of the valid input range. The next most significant bit is determined by whether the input is in the upper or lower half of the remaining range, and so on, until the least significant bit is determined. For programming purposes, the 8 most significant bits of this number our stored and used in the rest of the program. Thus the resolution is about 1/256th of 5V. 5V corresponds to a height of about 80cm, thus a resolution of 3mm, which is sufficient for our goals.
A few steps are required to properly set up the converter and to perform a conversion. First, the I/O pin to be used for analog-to-digital conversion is configured as an analog input. This channel to convert is then selected and the module configured and enabled. A delay for the acquisition time is then provided. Acquisition time is the amount time required to charge the holding capacitor on the front end of an analog-to-digital converter. The holding capacitor must be given sufficient time to settle to the analog input voltage level before the actual conversion is initiated. Once the conversion has completed, the result can be read. Thus, the steps in our program to execute a correct conversion are:
- · Wait the
acquisition time
- · Initiate the
conversion
- · Wait for the
conversion to complete
- · Read the
result
Back
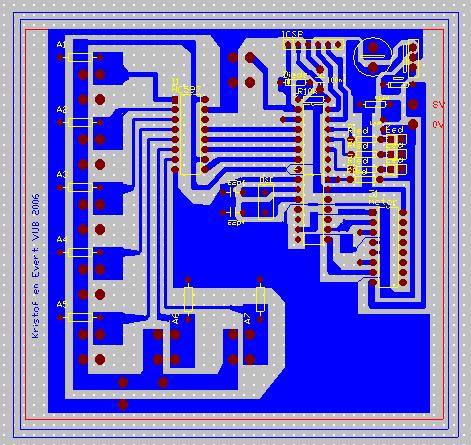
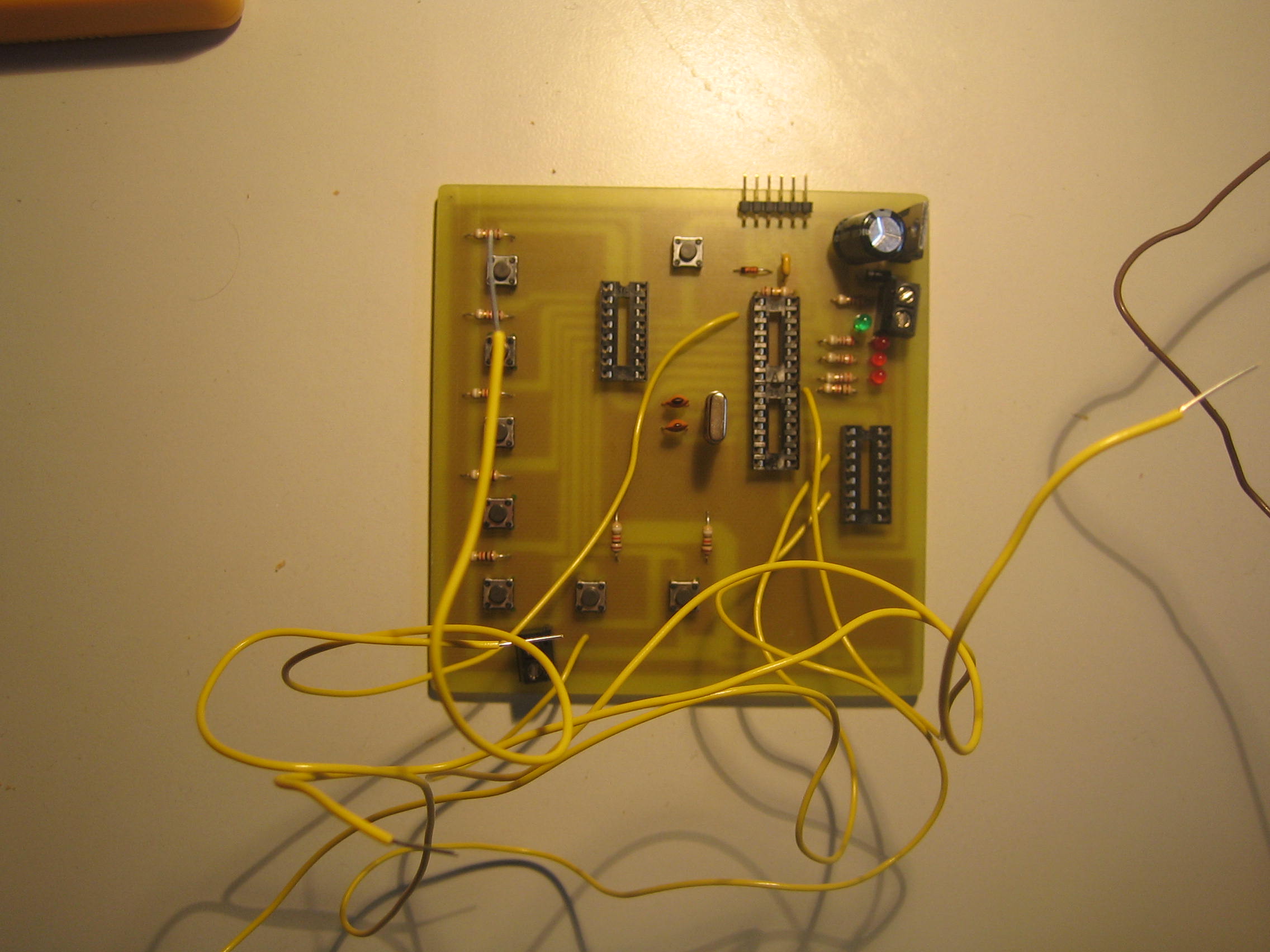
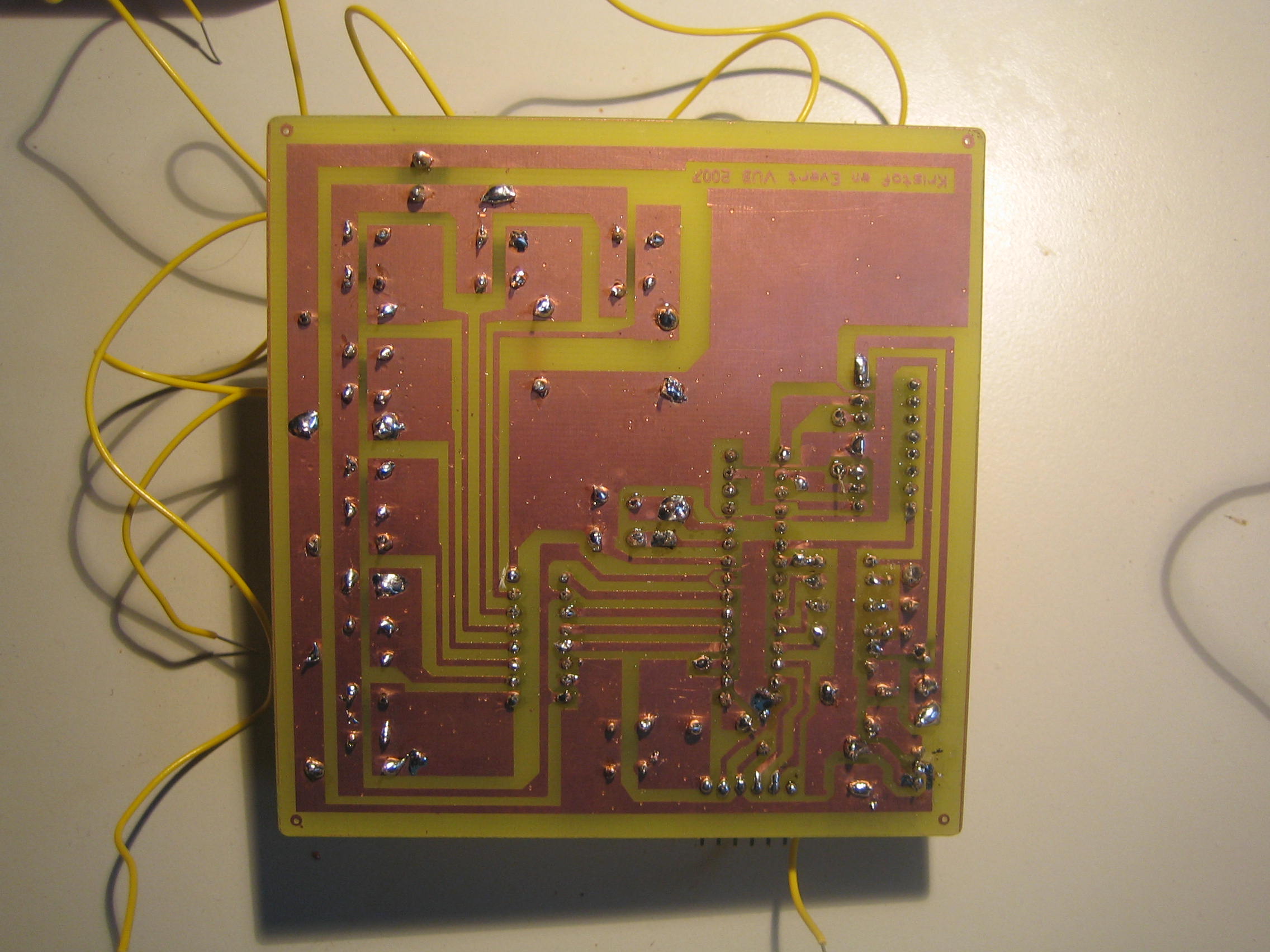
Traxmaker
A working test-circuit using these components was made.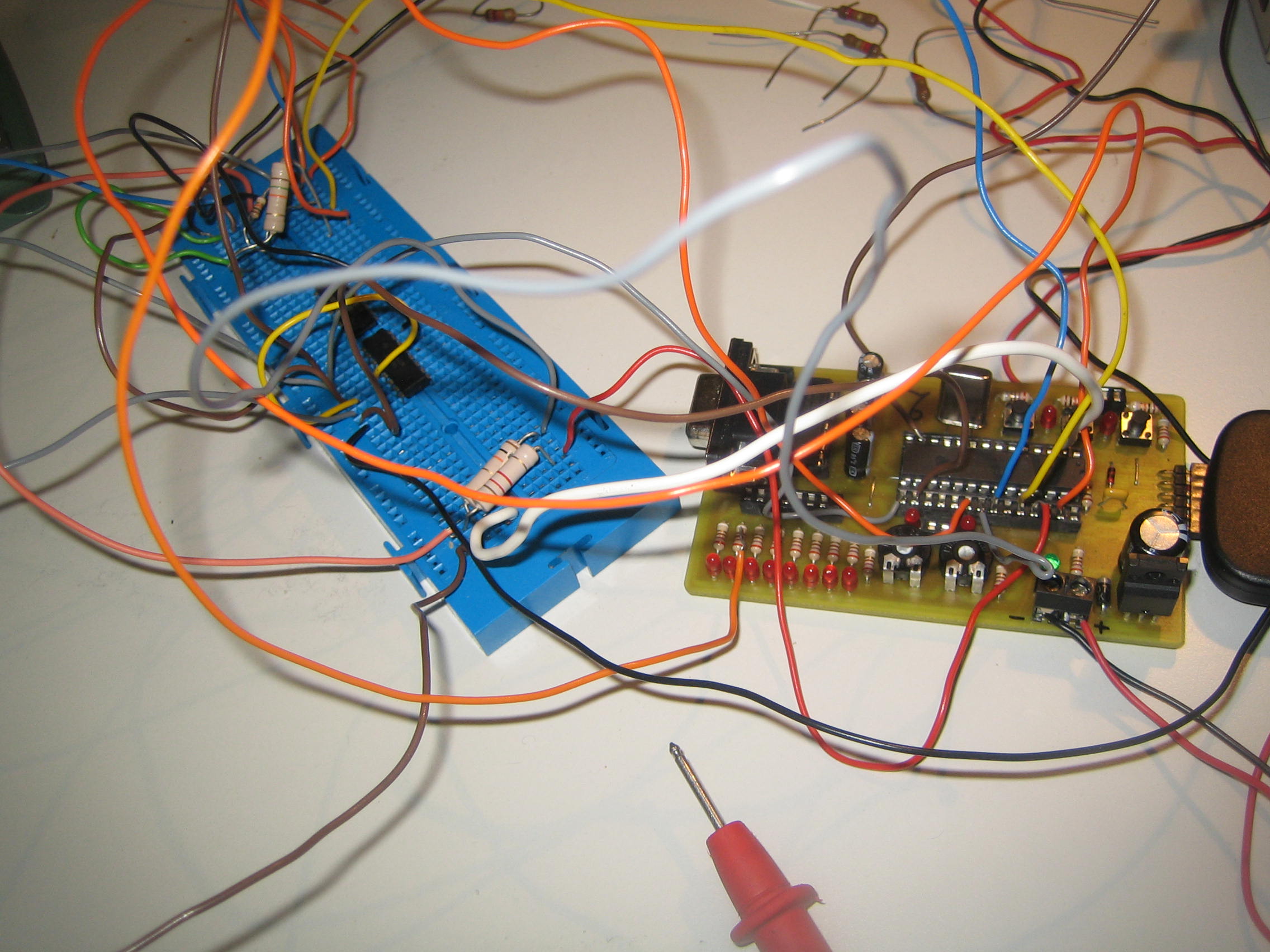
Back
Datasheets PIC16F876A
HC597
L293
Pictures