The Motors
When calculating the torque the motors should be able to deliver, only the contact of the Whegs with the
ground is taken into account. But tensioning the belt means that the motors should also be able
to overcome the friction caused. Since this friction is quite high and the motors are not chosen to
overcome this friction, they are not powerful enough to move correctly the belts tensioned.
To reduce this problem, the belt tension is reduced. By doing this, a lot of power is lost and
the Wheg that is furthest from the motor will turn more slowly.
The possible improvements of this part of the robot could be to find better motors delivering a higher torque (or higher
rotation speed, and then use a gearbox). Another solution could be to improve the distribution mechanism.
The tensioning of the belts
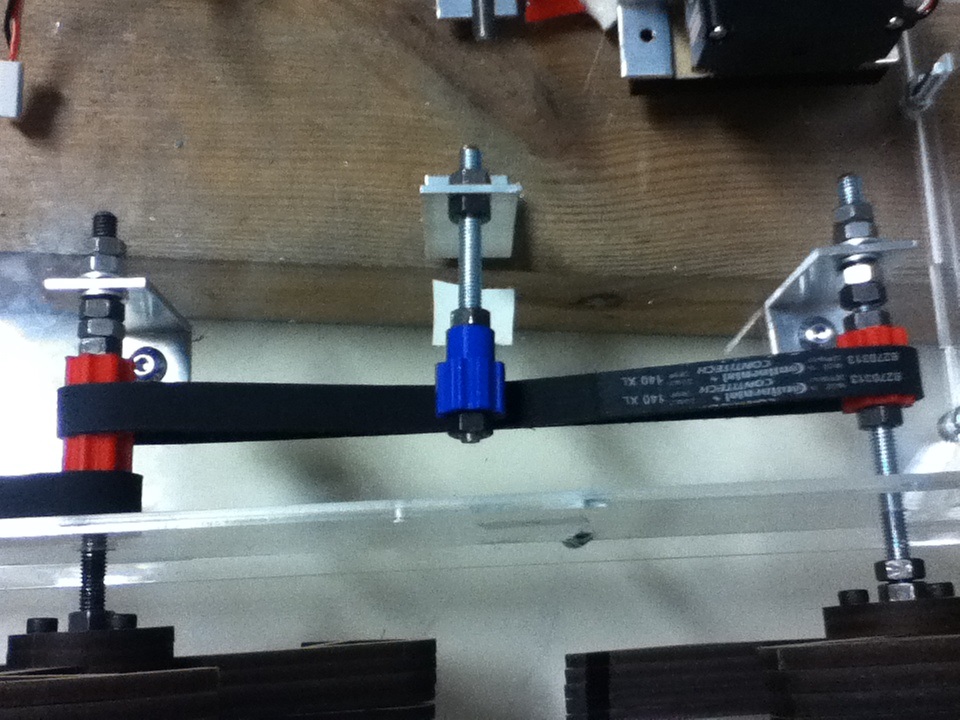
Tension roller |
When choosing the belts, the length seemed a perfect fit with the robot design. But, when installing the belts
however, they appeared to be too large. Thus, tension rollers were needed. To add these tension rollers, extra
holes were made in the plexiglas plates. The result afterwards was that the belts were tensioned better, but the
tensioning was not perfect. To overcome this problem, adjustable tension rollers could have been used. For instance,
the use of spring to control automatically the tension of the belts could be a nice improvement.
The Whegs
The original idea was to give the robot a sort of L shaped Whegs (for more information see the page
'Design of the robot'). These are well suited to overcome obstacles
when moving forward. The motors, however, are not powerful enough to overcome the large gap in the Whegs. To make the robot move, the
multiplex plates, where the Whegs are made of, are placed in a symmetric configuration to reduce the
gap (Symmetric should be understood here as having "triangular" in stead of L shape Whegs). Although smaller, there is still a gap present, which makes it possible for the robot to overcome
obstacles higher than the radius of the wheels.
Another advantage of this symmetric configuration is that there is no longer a difference in moving backward and moving forward.

The original Whegs |

The symmetrical Whegs |
The L-profiles
The L-profiles are used to support the rods. Because the rods are threaded however,
the rods do not turn smoothly when supported by the L-profiles. This could be
improved by removing the thread of the rod where there is contact with the L-profile.
Another possibility is to use bearings instead of L-profiles to support the rods.
The Control of the Rotation
The control on the rotation of the Whegs used in this project is based on the use of encoders connected
to the rods (linked to the Whegs). These encoders are placed on the most far Wheg compared to the motor position.
As the tension of the belt is not sufficient, this Wheg has a rotation speed a bit lower than the wheg connected to the motor.
This difference of rotation speed can make the robot turning when it should go forward.
Furthermore, if some Whegs are slipping in the air or on the ground, the encoder will continue to measure the rotation of the Whegs, even if
no distance are really crossed by the robot. The programming will work normally because it cannot detect this kind of abnormal behaviour.
A solution to these problem could be to use a Gyroscopic sensor on the robot. Indeed, this sensor can inform about the rotation of the robot.
If it should go forward, the behaviour is abnormal and the control on the rotation speed of the motors can be performed, in order
to adapt the speed of the motor turning too quickly of too slowly (in function of the direction of the rotation).
This kind of sensors are a bit more expensive than the encoders used in this project, but could solve the problems described previously.
Back to Top
 The Whegs-Robot Team
The Whegs-Robot Team
