Vrije Universiteit Brussel
ALTACRO - Step Rehabilitation Robot
The ALTACRO ProjectALTACRO is a multidisciplinary research project that aims at the development and clinical testing of a step rehabilitation robot powered by compliant actuators. The ALTACRO project is a contribution to the synergy between robotics and rehabilitation. The acronym stands for Automated Locomotion Training using an Actuated Compliant Robotic Orthosis. Our primary goals are to improve the quality of step rehabilitation therapy both for patients and therapists and increasing the availability of automated step rehabilitation training.
Find more information on the ALTACRO website. Contact informationContact Persons:Prof. dr. ir. Dirk Lefeber E-mail: dirk.lefeber @vub.be
Address:
Phone: +32 2 6292862 Research TeamBehind the ALTACRO project is a multidisciplinary research team, the Advanced Rehabilitation Technology & Science research group (ARTS), involving six research groups of the Vrije Universiteit Brussel (VUB). Four groups are part of the faculty of Physical Education and Physiotherapy, one group is part of the faculty of Medicine and one of the faculty of Engineering.
IntroductionGait training proves to be an effective approach to help patients with neurological disorders (e.g. stroke, multiple sclerosis) or neurological injuries (e.g. incomplete spinal cord injury) regain functional walking abilities. Intensive walking training appears to be vital to the activity triggered learning process of the sensorimotor system. For people who will probably never walk again, for instance due to complete spinal cord injury, assisted gait training diminishes the negative effects resulting from being bound to a wheelchair.In one of the existing practices, body-weight supported treadmill training (BWSTT), the patient's body weight is partially supported by an overhead harness while his/her lower limb movements are assisted by one up to four physiotherapists. The strenuous physical effort encumbering the therapists and the resulting short training session duration was one of the main reasons for introducing robotics into gait rehabilitation. The envisaged benefits were:
Repeatability, accuracy and quantification are features easily associated with robotics. However, a robot operating in close physical contact with an impaired human requires an approach to robot performance that differs significantly from the viewpoint of industrial robotics. Accurate repeated motion imposed by a position controlled robot is considered contraproductive for several reasons: a lack of adaptable and function specific assistance, a limitation of the learning environment, reduced motivation and effort by the patient, and a risk of unsafe human-robot interaction. Nowadays, the field of rehabilitation robotics is increasingly convinced by a human-centered approach in which robot performance is focused on how the robot physically responds to and interacts with the patient. Research projectIn the ALTACRO concerted research action project a multidisciplinary team of doctors, engineers and physiotherapists at Vrije Universiteit Brussel conducts research into four identified challenges in robot-assisted gait rehabilitation:
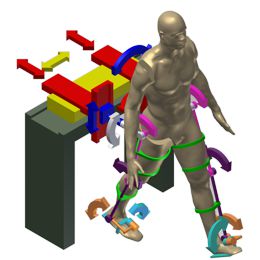
One of the main project goals is the development of a novel full lower body exoskeleton powered by compliant actuators and the clinical evaluation of its concepts aimed at improving robot-assisted gait rehabilitation in the four aforementioned areas. ALTACRO is a 5-year project (2008-2012) funded by the university research council of Vrije Universiteit Brussel. ALTACRO stands for Automated Locomotion Training using an Actuated Compliant Robotic Orthosis. Project GoalsThe primary objective is to enhance the quality of automated step rehabilitation training both for patients and therapists, in this way increasing its availability.Integrating the expertise of neurological rehabilitation, functional anatomy, biomechanics, physiology and robotics, the project aims to develop and assess an original robotic rehabilitation system, providing the capacity to substantially enhance the prognostic health profile of the patient. In addition, the research outcomes will contribute to the synergy between robotics and rehabilitation and to the development of related applications in the emerging fields of rehabilitation robotics and assistive robotics. Research tasksThe key objective of the project is the development and clinical study of a novel step rehabilitation robot prototype. Research activities are clustered according to the four research challenges to be addressed.Active ankle assistance
Project status2012
2011
2010
2009
2008
LinksAcademic sites
User committee
|
||||||||||||||||||
©2019 • Vrije Universiteit Brussel • Dept. MECH • Pleinlaan 2 • 1050 Elsene
• Tel.: +32-2-629.28.06 • Fax: +32-2-629.28.65 • webmaster