Vrije Universiteit Brussel
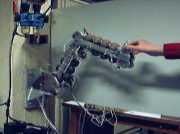
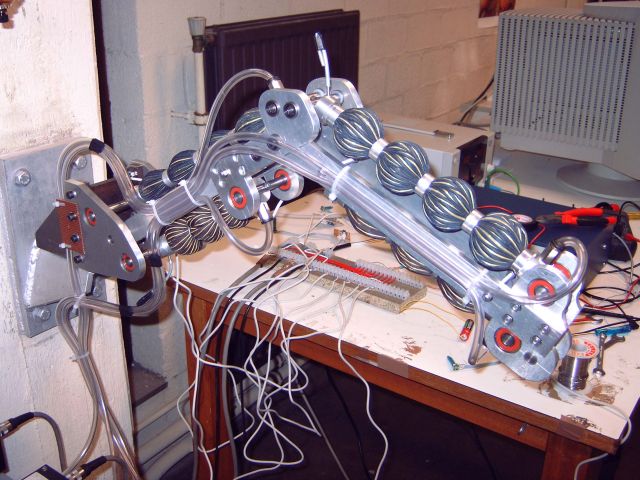
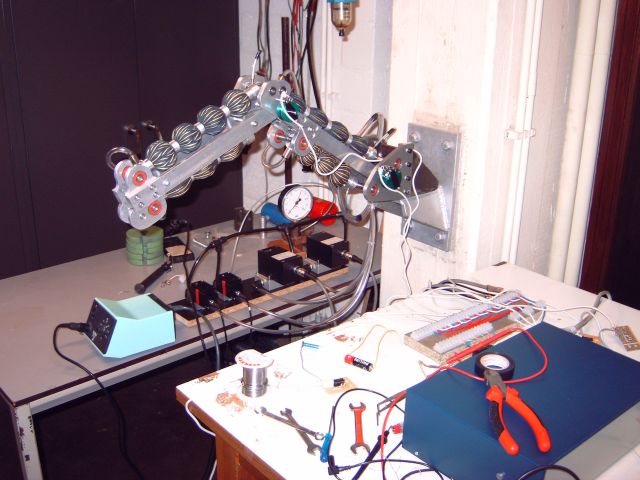
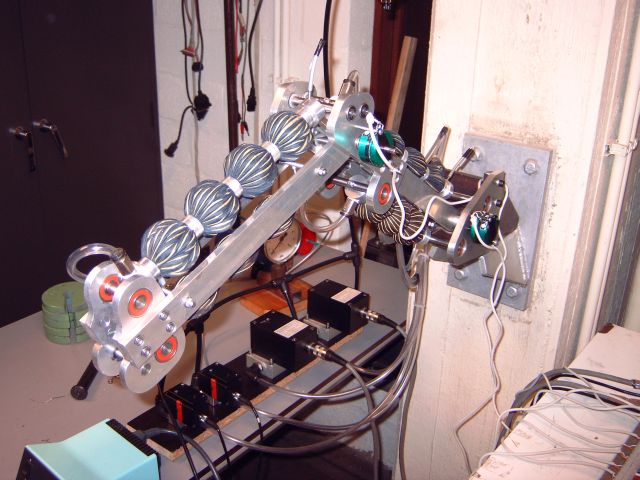
Soft ArmIntroductionRepetitive manual handling of heavy loads is common in assembly and is a frequent cause of lower back disorders. This can have a significant impact on the quality of life and has a serious economic cost. Manipulators are robotic systems designed to avoid these problems. They assist people in performing heavy-duty tasks.Most of the commercially available manipulators use a counterweight, which limits their use to handling loads of a specific mass. Others are electrically or hydraulically actuated. This usually makes them heavy, complex and expensive. The use of the PPAM actuator allows us to tackle these issues and develop a manipulator that combines ergonomics, operator safety, low cost, low weight and ease of operation. The goal of our research is to develop a proof-of-concept manipulator that will be used in direct contact with an operator, without expensive force or torque sensors and without user interaction through control elements (such as joysticks). We are working towards a system that behaves as follows: when the operator wants to move a load attached to the manipulator, he/she starts moving it as if there were no manipulator. By measuring the muscle gauge pressures, the system can estimate the forces applied by the operator and assist him in accomplishing the desired load movement. Ideally, moving a 30 kg load would feel like moving a 3 kg load. The direct interaction between operator and load (without intermediary control tools) allows for very precise positioning. The main requirement for any mechanical device that is used in the immediate environment of people is safety. The PPAM actuators greatly contribute to the overall safety of the manipulator system: they allow for a lightweight construction, there is no danger of electrocution and, most important of all, the muscles are inherently compliant. The controller will also enhance safety, since there is no fundamental difference between forces generated by a collision and forces applied by an operator. The system will always tend to move away from people or objects it collides with. Issues that have to be dealt with in the design include matching the nonlinear force-length characteristic of the PPAM to the requirement of being able to carry and move the load throughout the entire working area and making sure that the applied operator pressure can be estimated accurately enough in all manipulator positions. The main control challenge in this highly nonlinear system is obtaining a natural feel for the operator At present, the hardware setup of a small-scale manipulator is nearing completion. It consists of two PPAM actuated links in inverse elbow configuration. A controller for the system is currently being developed. Movies and pictures
Financial supportThis research is supported by the Fund for Scientific Research - Flanders (Belgium), grant FWOKN147.PublicationsInternational journal papers
Conference papers
Researcher: Michaël Van Damme |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||






©2019 • Vrije Universiteit Brussel • Dept. MECH • Pleinlaan 2 • 1050 Elsene
• Tel.: +32-2-629.28.06 • Fax: +32-2-629.28.65 • webmaster