









What is bluetooth:
To put it simply, Bluetooth is a technology standard for electronic devices to communicate with each other using short-range radio. It is often referred to as a “cable replacement” technology, because it is commonly used to connect things, such as cameras, headsets, and mobile phones that have traditionally been connected by wires.
To establish a connection we used the EmbeddedBlue eb500:
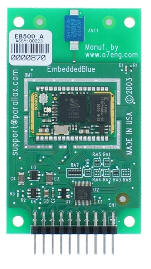
All the information about this chip can be found in the datasheets.
The interface:
To achieve the first mode of our robot we had to program a GUI (Graphical User Interface ). Instead of using Visual Basic (VB) we used C#, because C# (pronounced "C-sharp") is an object-oriented programming language from Microsoft that aims to combine the computing power of C++ with the programming ease of Visual Basic. C# is based on C++ and contains features similar to those of Java.
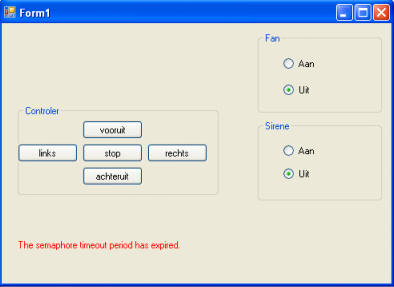
Programming the GUI in C# is very easy, it is actually the same as in VB. In our GUI we created 3 regions:
1) The controler: to drive with the robot
2) Fan: to put the fan on or off
3) Sirene: to put the LEDs on or off
After Making connection between the bluetooth key and the embeddedblue 500 the PC creates two serial Ports. In C# one just has to create a serial connection with these ports. We just connected to the outgoing port because we didn't need to receive any information. Everytime when we click a button or a radiobutton on the GUI we send a byte to the embeddedblue 500. This byte contains all the information the robot needs:
- bit 1 and 2 : contains the information of the left engine
- bit 3 and 4: contains the information of the right engine
- bit 5: contains the information of the fan ( on = 1 out = 0 )
- bit 6: contains the information of the LEDs ( on = 1 out = 0 )
- bit 7 and 8: contains no information
It didn't work to drive the robot using bluetooth, we tried to find the reason, but we still don't know exactly what went wrong (see also conclusions).
Click here to download the programm
Last Update: 21/05/2008 15:16