









Click here to download the movie.
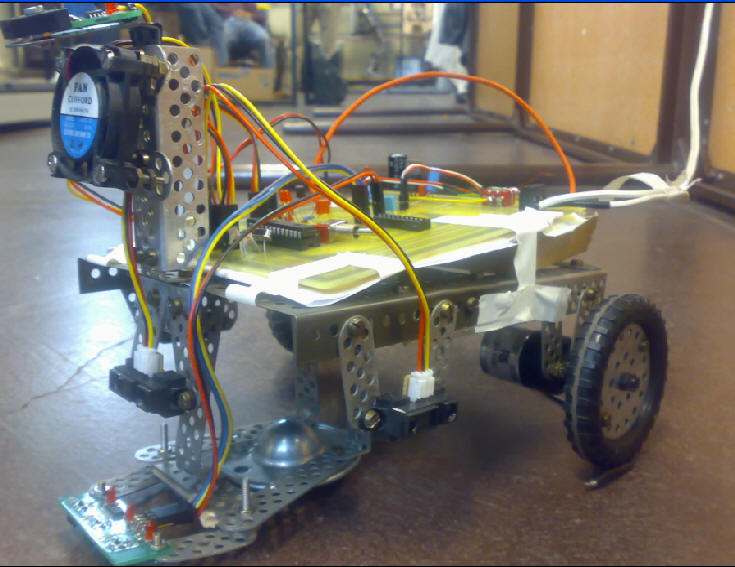
During this project the students had to build and to program a fire car. This car has next limitations:
- 20cm in length
- 20cm in width
- 20 cm in height
The students could use next components:
- 1 x Microchip PIC16F876A
- 3 x Sharp GP2D12 IR sensors
- 1 x Tracker sensor
- 1 x Reflective IR sensor
- 1 x EmbeddedBlue eb500-SER module
- 2 x Engine with reduction controlled with a H-bridge driver (L6205)
- 2 x Battery packs (6V)
- 1 x Fan
There are 2 workingmodi:
1) Manual mode: The robot needs to be controlled manually, by sending instructions from a PC with a serial communication to the robot. The
communication can be established with the EmbeddedBlue eb 500-SER.
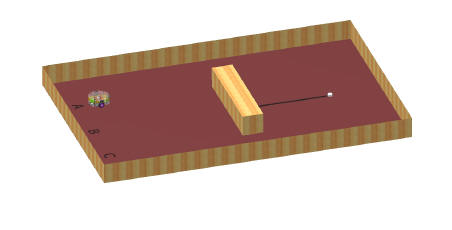
2) Auto Mode: The robot needs to work autonome, with flickering LEDs. Once the candle is out, the LED's have to stop flickering. The traject that the
robot has to folow depends on witch position the robot wil start: A, B or C as marked on the next picture.
After we did some research, we designed our fire car in Inventor. When the robot was build we started with programming in Assembler and in C#, and after testing all components we started to make our printboard in TraxMaker.
We used C# to program the interfacing software for the first mode, and Assembler to program the microchip.
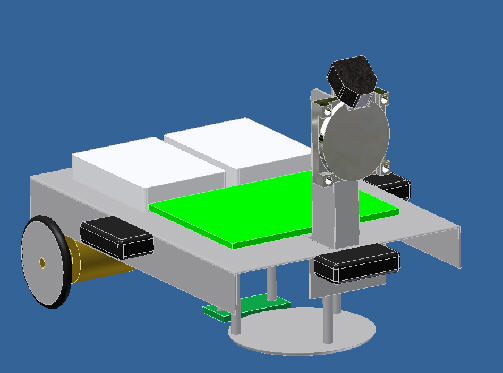
Click on picture above to download the drawings in Inventor
Last Update: 21/05/2008 15:14