Programming : Tasks
- Communication with the user: LCD screen and buttons
- Read signals from 5 Flex Sensors and write it on Servo
- Implementation of a certain delay
I. Communication with the user
We use the libraries:
#include < Wire.h >
#include < LiquidCrystal_I2C.h >
With simple functions as:
lcd.clear();
lcd.print();
Four buttons are used: OK, +, -, CHANGE
The buttons are set as entries with pull-up resistances;
pinMode(buttonOK, INPUT_PULLUP);
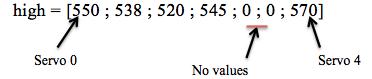
Settings are asked at the beginning. We also made an initialization of the maximum and minimum values of resistance for each sensor
(to map the value and fit the movement at its best). Each result is memorized in a vector high[] and low[].
High[0] is the maximum resistance for the analogic potpin 0.
CHANGE generates an interrupt when the program is running.
The user choose the delay and the program
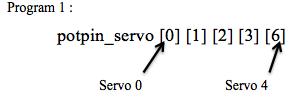
Program 1 : standard mode (no delay)
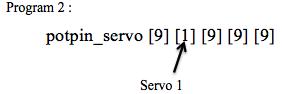
Program 2 : only the index moves
Program 3: random mode, the fingers on the real hand actuate random fingers on the robotic hand
II. Read signals from 5 Flex Sensors and write it on Servo
We use the library:
#include < Servo.h >
With simple function:
servo.write(tmp);
We implement two functions:
void write_position_from_finger(int number_of_servo, int potpin_finger)
-number_of_servo: where to put result in the matrix named position[]
-potpin_finger: on which analogic we must read. If this value is 9, we don't read the flex and set the value at 30 (to disable the servo).
void write_position_on_servo(int number_of_servo, Servo servo)
-number_of_servo: where to read in the matrix position[]
-servo : which servomotor we work on
Each 10ms, we made a data acquisition. The resistance measurement is converted into degrees with the function map().
Then, the values are memorized in the matrix.
Timer0 => use in delay()
Timer1 =>use in servo()
We choose Timer2 (8 bits timer) with overflow interrupt and prescaler of 1024; and we set the count at 99.
Timer will count until 28-1=255 before interruption. Speed of timer = 16mHz/1024= 15, 625Hz
Period to make 255-99(=156) steps is equivalent to 0,010016s = 10ms
void Timer2init()
{
TCCR2B = 0x00; // Disable Timer2 while we set it up
TCNT2 = 99; // Reset Timer Count (255-99) = execute ev 125-th T/C clock
TIFR2 = 0x00; // Timer2 INT Flag Reg: Clear Timer Overflow Flag
TIMSK2 = 0x01; // Timer2 INT Reg: Timer2 Overflow Interrupt Enable
TCCR2A = 0x00; // Timer2 Control Reg A: Wave Gen Mode normal
TCCR2B = 0x07; // Timer2 Control Reg B: Timer Prescaler set to 1024
};
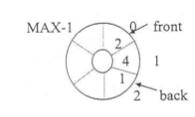
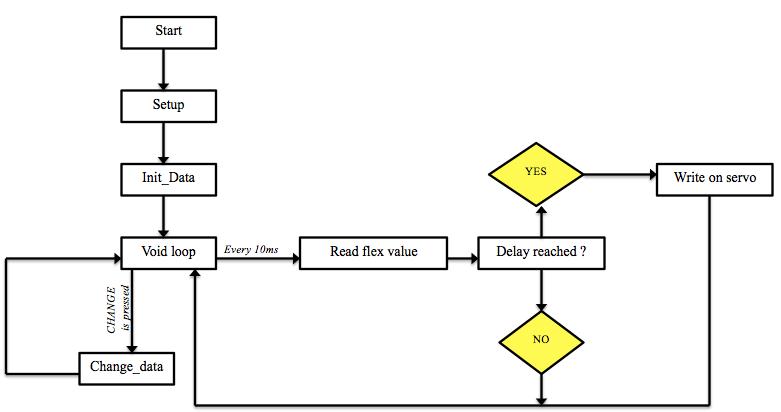
III. Implementation of a certain delay
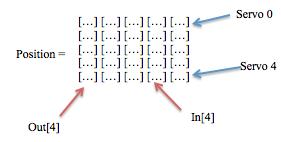
We chose a static implementation with a circular vector:
Vector with a number of cases equal to the ratio between delay max/period of acquisition (here 1000ms/10ms = 100)
in = position in vector for stocking reading value on finger
out= position in vector to read value and set servo with it
When the value designed by out is set on servo, we can erase it => increment out.
When in or out is > 100, set it at 0 (circular vector)
Condition in interrupt to enable movement of servo => delay/10 cases between the two values.