Mechanics
Design
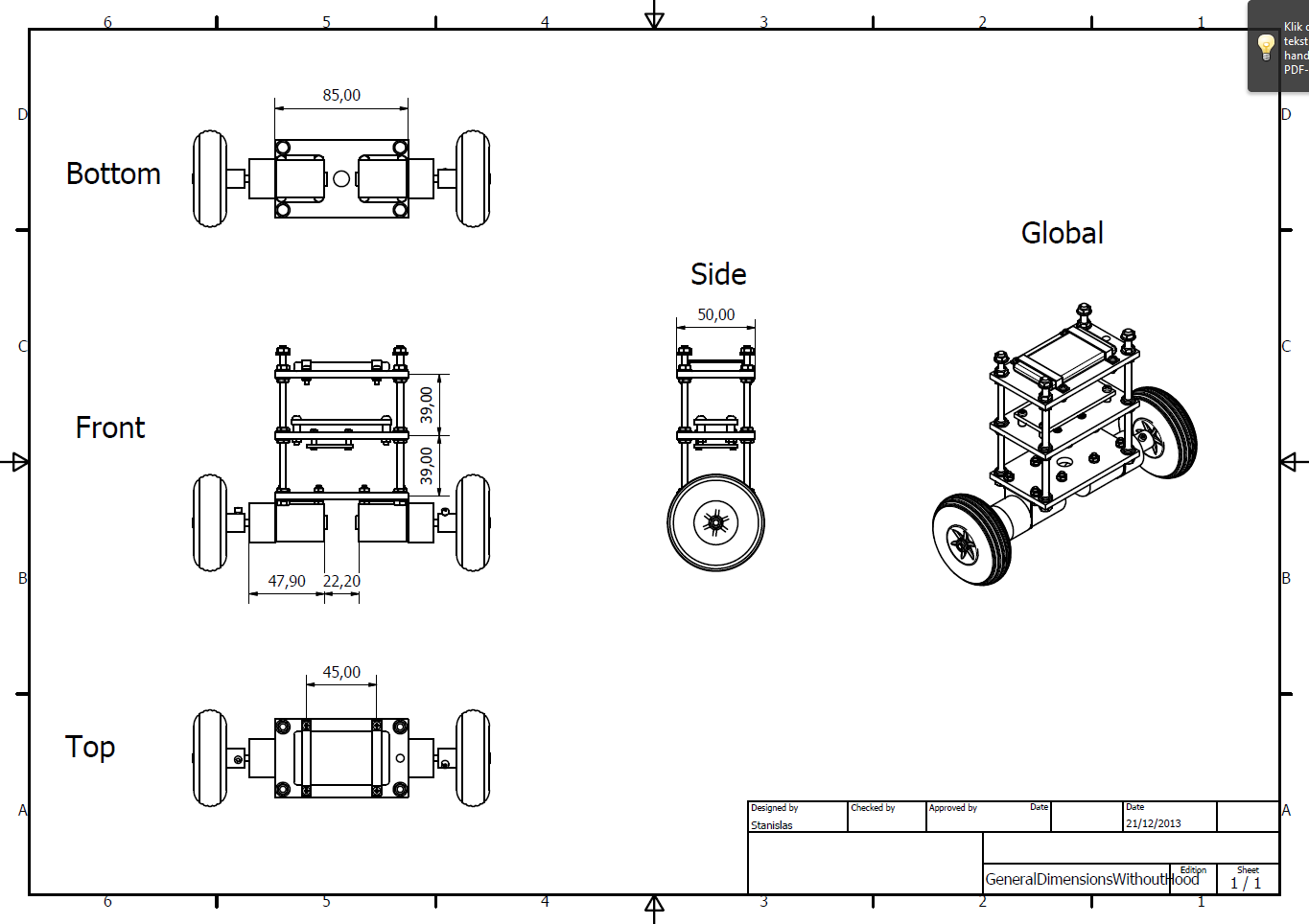
We prefered a very simple mechanical design for our mobile inverted pendulum, to decrease the chance of hardware failure, and ofcourse simple manufacturing. As can be seen in the figure underneath, the robot consists of 3 basic plates, which are connected to each other by four, long bolts. On these 3 plates, all of our electronic components are mounted. On the top plate, the battery is mounted. The middle plate holds the main PCB and the bluetooth PCB. The bottom plate is fitted with the two electromotors.
To make the robot a little bit fancier, we designed a hood to fit over it. It can be attached on the four main bolts which hold the plates together.
All of the 3D-models and technical drawings were made with Autodesk Inventor Professional 2014.
Click to enlarge:
 |
 |
Manufacturing
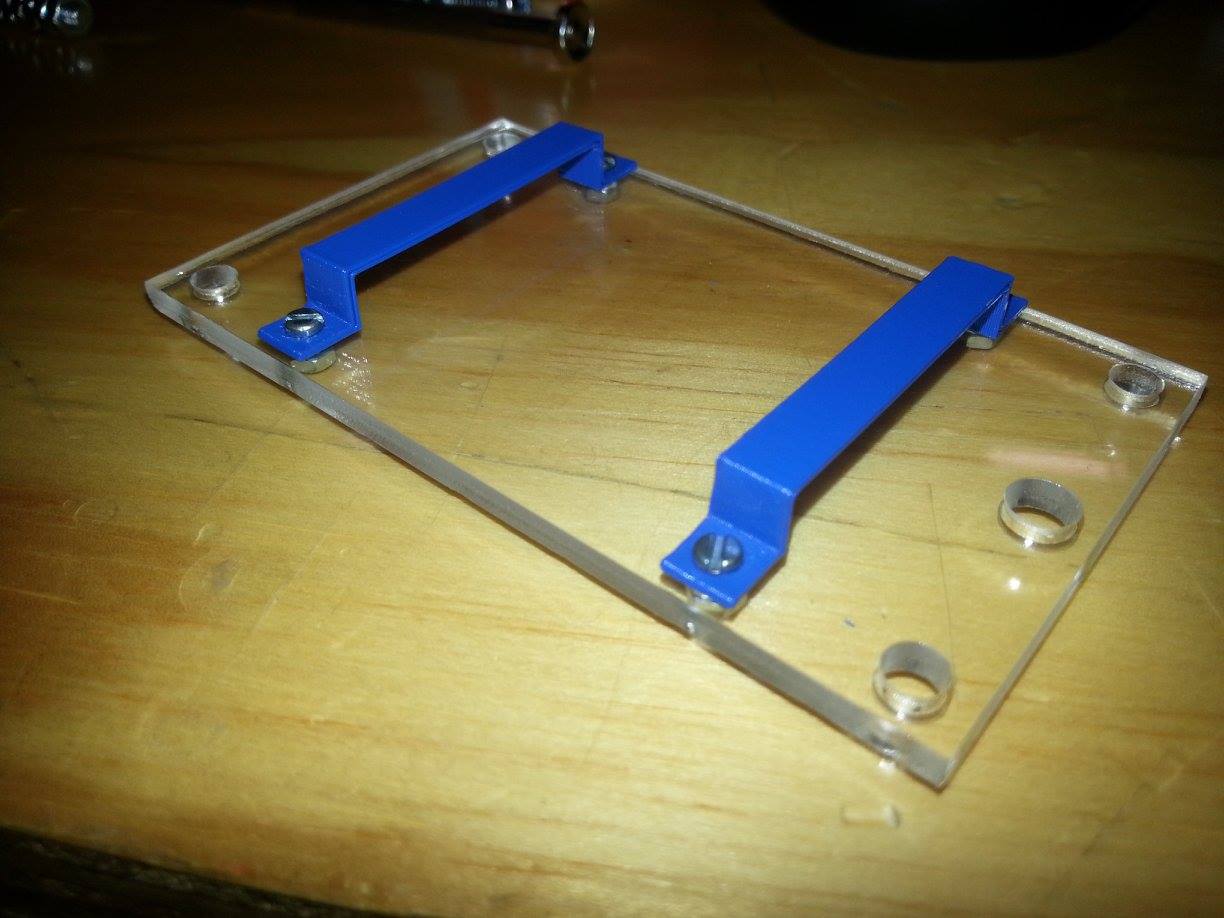
The three plates are made of plexiglas (Polymethylmethacrylate) and were manufactured by a computer controlled lasercutter. The plates are very basic, and could be manufactured with very basic, manual tools like a saw and a drill. Because we had the lasercutter at our disposal, we choose to use this manufacturing method because of its great accuracy and precision, which assured a perfect alignment of all the holes.
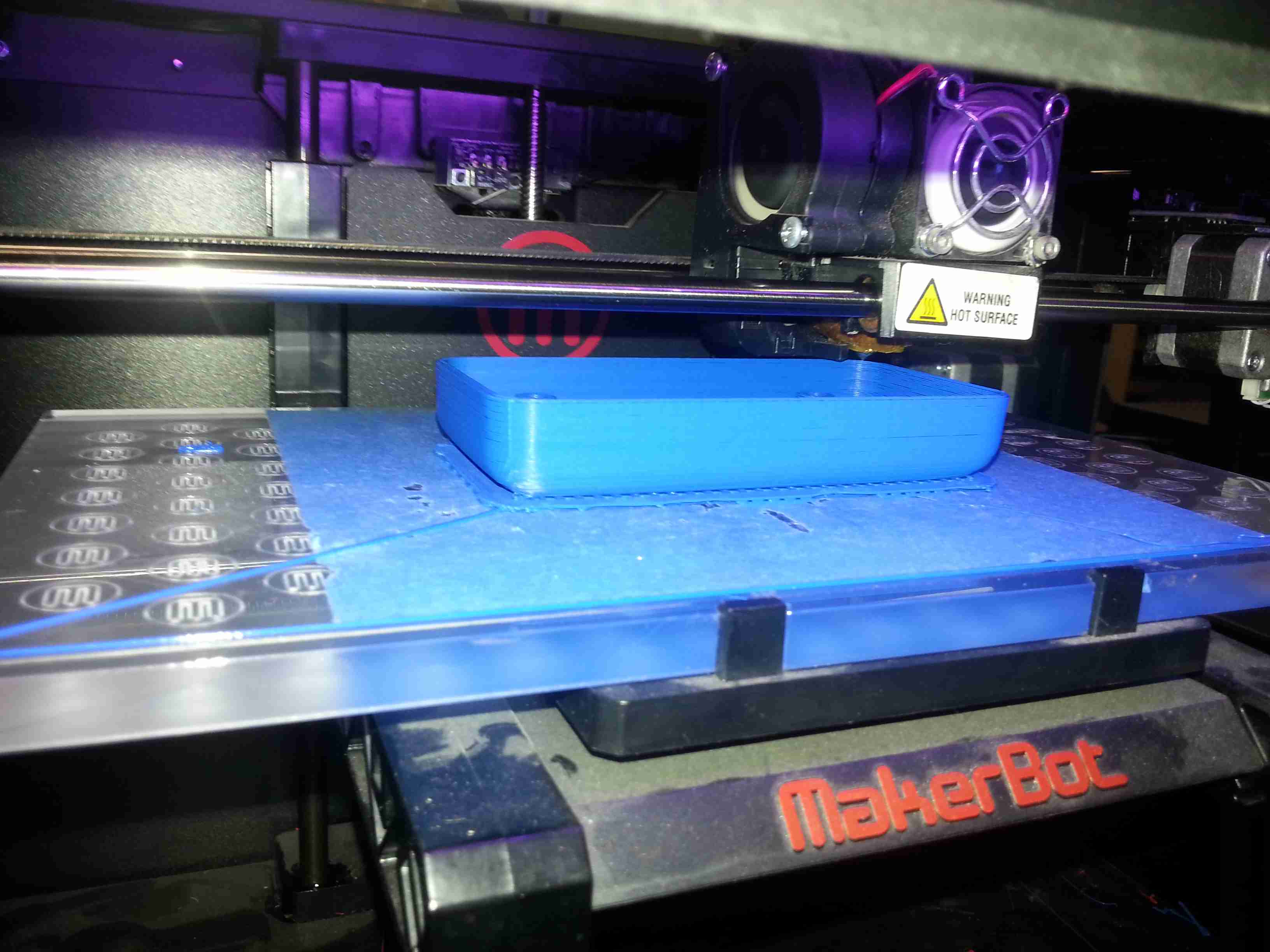
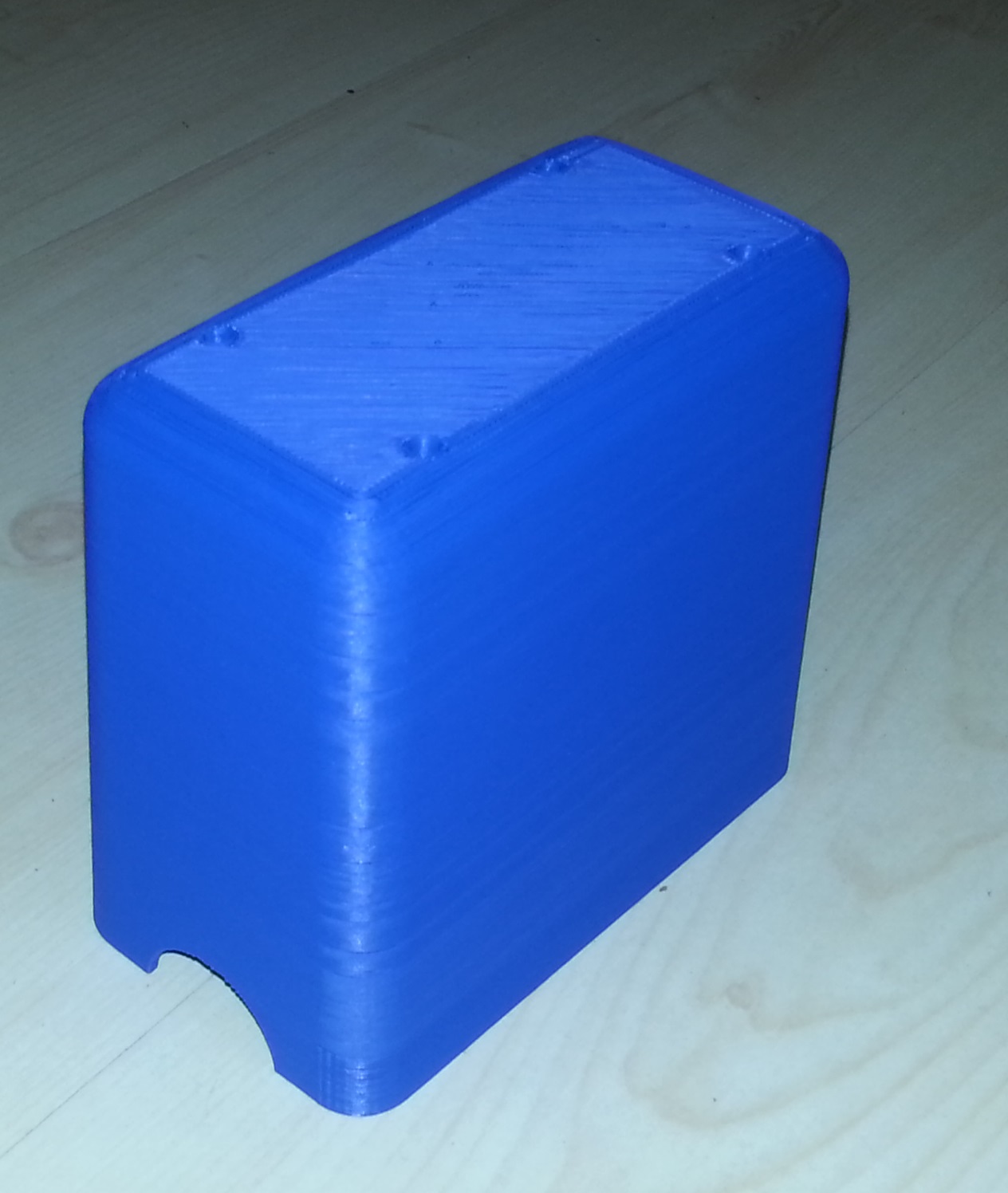
The hood was 3D-printed with a MakerBot Replicator 2X using ABS material. By using a 3D-printer, we were able to make a smooth shaped, curved hood. The hood isn't necessary for the functioning of the robot, so this part could be left out if you don't have a 3D-printer or equivalent manufacturing method at hand.
The rest of the components are just some bolts, nuts and washers, which are available at a local hardware store. The exact amount and size can be found in the mechanical part list below.
In the figure below, the plexiglas plates and the hood is shown. Click to enlarge:
 |
 |
 |
 |
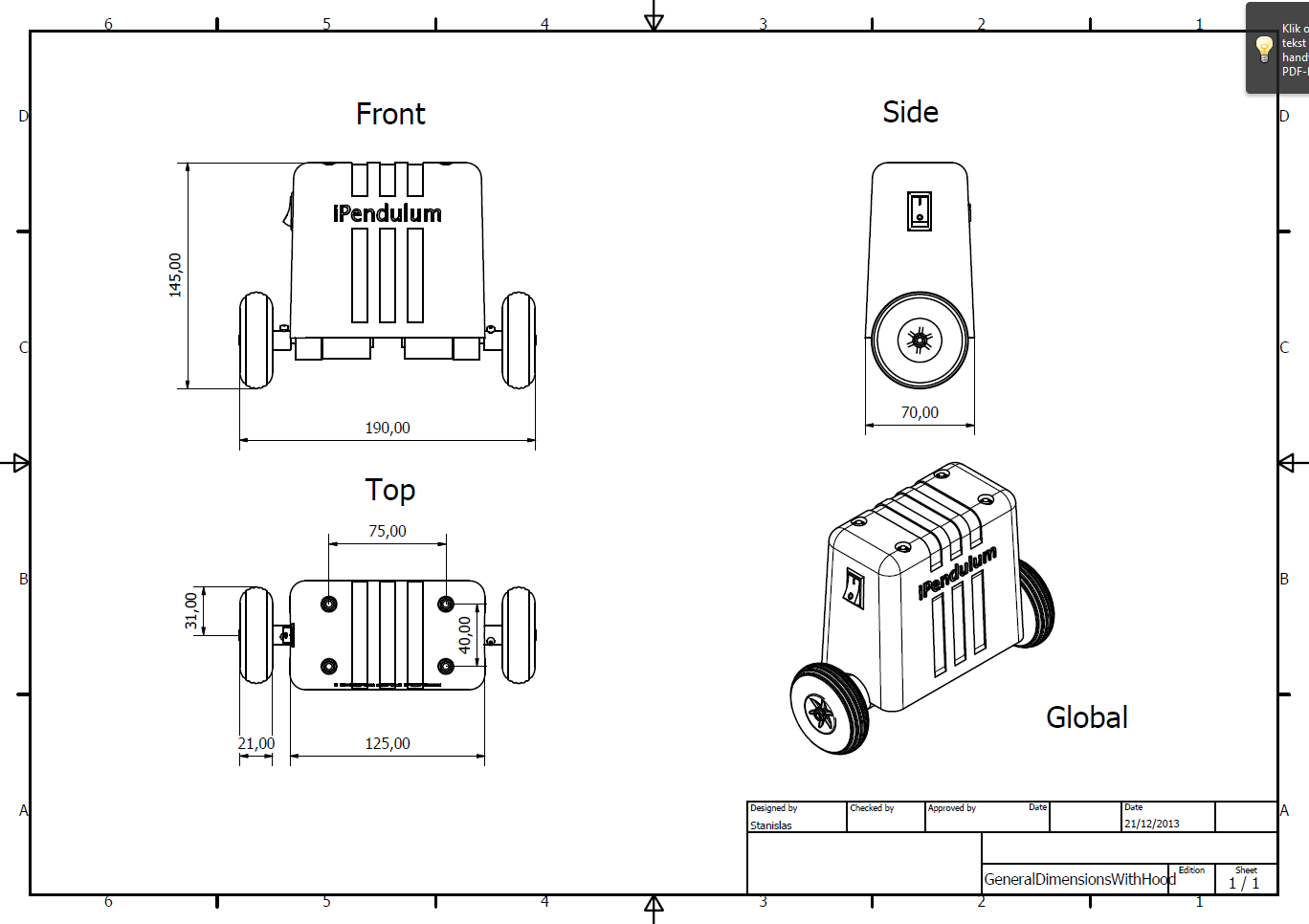
3D model and technical drawings
The 3D-model made with Autodesk Inventor can be downloaded from Dropbox using the following link:
Click to enlarge:
 |
 |
Part list
The mechanical parts are listed in the following table:
| Mechanical Part List | ||
|---|---|---|
| Part | Amount | |
| Custom made | Top plate | 1 |
| Middle plate | 1 | |
| Bottom plate | 1 | |
| Battery holding brackets | 2 | |
| Hood | 1 | |
| PCB | 1 | |
| On/Off switch | 1 | |
| Ordered | Wheel (31mm radius) | 2 |
| Electromotor with gearbox (MFA/Como Drills 918D Series type 918D301/1 with RE280 motor) | 2 | |
| Battery | 1 | |
| Bolts and Nuts | ||
| M4x100 'long' bolts | 4 | |
| M4 nuts | 32 | |
| M3x10 bolts | 12 | |
| M3 nuts | 12 | |
| M2.5x10 bolts | 4 | |
| M2.5 nuts | 4 | |
| M2x12 bolts | 3 | |
| M2 nuts | 3 | |
| (optional: washers to go with the bolts for a better fix) | 3 | |