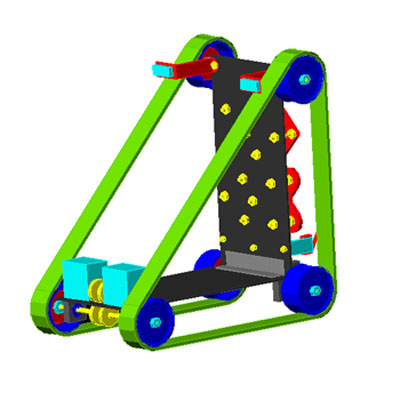
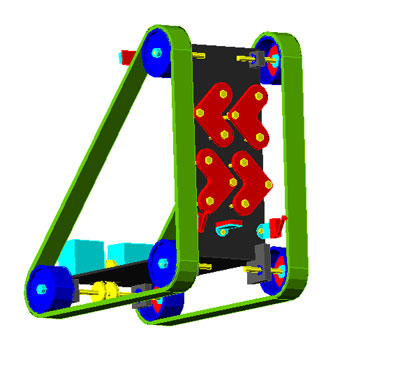
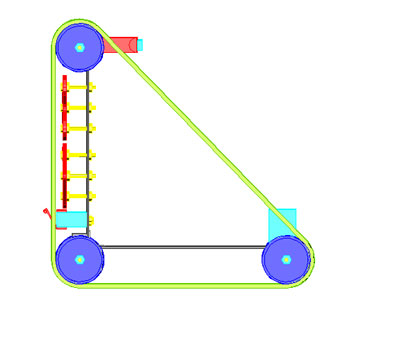
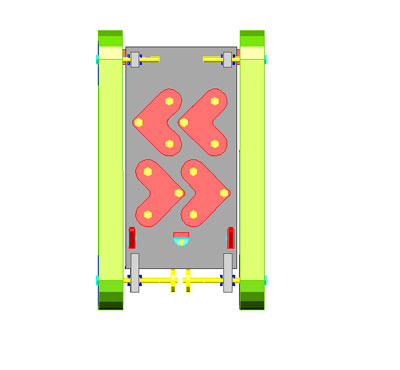
Om aan de eisen van de wedstrijd te kunnen voldoen gaan we gebruik maken van een robotje gebouwd met een rechte hoek. Door deze hoek kan Vertigo zowel horizontaal als verticaal bewegen, hiermee kan je al voldoen aan minstens een van de eisen. Met magneten kunnen we er voor zorgen dat het robotje tegen de verticale wand blijft kleven zonder van de verticale wand te vallen. Het wegglijden van Vertigo wordt opgevangen door de rupsbanden. Deze rupsbanden zorgen eveneens voor het overbrengen van het koppel naar de overige wielen. Dit zorgt ervoor dat de transmissie heel eenvoudig blijft. Om het concept nog verder te vereenvoudigen maken we gebruik van twee motortjes die we onafhankelijk aansturen zodat een stuurinrichting overbodig wordt.
Om aan de tweede eis, namelijk het detecteren en omzeilen van objecten, te voldoen, maken we gebruik van sensoren. Lichtsensoren hebben het voordeel om hindernissen te detecteren zonder contact. Het nadeel is hiervan dat ze afhankelijk zijn van het omgevingslicht. Dit wordt deels opgevangen door een comparator te gebruiken. Voor de robuustheid hebben we ook microswitchen geplaatst. Van een switch is het gebruik gewaarborgd, maar er moet tegen een object gereden voordat het gedetecteerd kan worden. Als laatste hulpmiddel gaan we gebruik maken van een potentiometer. Deze potentiometer stelt ons in staat om de oriëntering ten opzichte van de grond te bepalen op de verticale wand.
Op basis van deze CAD tekening hebben we ons mechanisch ontwerp verder uitgewerkt.