The very first task in this project was to come up with a rough design, a concept that would be able to fulfill all the tasks of the competition.
To transform itself from the horizontal to the vertical plane, we supplied our robot with a 90 degree angle. This would allow him to go up the wall very easily. This 90 degree angle also held in a consequence for the drive. If we wanted to limit the weight of Vertigo (and we did), it would be recommendable to use only one drive for both the horizontal and vertical displacements. To do this, we had two options: empower the common wheel, so the wheel that is on the corner of the robot. This wheel is always in play and so is our drive. Placing the engines at that location, would however cause a severe weight imbalance. When Vertigo is moving on the horizontal plane, he might fall over due to the imbalance, and that would be the end of it. The second option was to place the engine on the back, balancing the weight, and come up with a light, simple and robust transmission. This meant that the power drive was to make a 90 degree angle. This problem was solved by using caterpillar links. This is the easiest and only way to come up with a simple power transmission that makes a 90 degree angle.
The caterpillar links have another goal. They keep Vertigo from sliding down. Instead of real caterpillar links, we used a transmission belt out of rubber. This material has a high friction coefficient and is supposed to help the magnets to keep Vertigo in place.
The drive of Vertigo consists out of two electrical engines. Since simplicity is a key word in our design, we opted to use two engines instead of one. This way, we didn't need a construction to steer. We could just drive both engines separately and use this to steer.
We are talking about driving up a vertical wall as if it were nothing special. But how are we going to keep Vertigo from falling down? Some techniques pop to mind. We could use an adhesive, a kind of glue or something. Or how about suction? We choose to use magnetism. The vertical wall is magnetic, and so we can use permanent or electromagnets to keep vertigo attached to the wall. Electromagnets have the advantage that you can govern their strength, and even turn them of when necessary. They require quite some current though, and are quite heavy. So we opted to use permanent magnets. However, not the household-kitchen-stick-them-on-your-fridge-magnets. We needed something stronger. The solution was to get some permanent magnets from old hard disks. The hard disks from older computers contain two very powerful permanent magnets and those magnets are sufficiently strong to keep Vertigo against the wall. Two or three of them will be enough. Of course, we also wanted to govern their strength a little, so we came up with a little construction that allowed us to govern the distance between the magnets and the wall, and so govern their force.
So now our robot can move and stay on a vertical plane, but it still needs eyes and brains, doesn't it? To allow Vertigo to avoid the obstacles, we used several different sensors. To begin with, we added some light sensor. This would allow Vertigo to detect the objects without touching them. Light sensors however are very sensitive sensors, what means that a change in ambient light can cause distortions in the output signal. To account for this, we used an electronic circuit with a comparator, but this does not always do the job. We placed 5 light sensors on our robot: three sensors on the front of the robot (when he is on the vertical plane) and two on the bottom. The three in front are used to detect obstacles, the two on the bottom differentiate between a black wall and a white wall.
As we already stated, light sensors are very sensitive sensors, so we added micro switches to design, just for safety. Beside the safety function, the micro switches also help us detect the upper side of the wall (which is only 1cm of height), and help Vertigo detect whether he is placed on the vertical or the horizontal wall.
The final sensor used is the potentiometer. This analogue resistor should allow Vertigo to calculate his orientation on the vertical wall and use this knowledge to decide on further action.
And what about the brains of our robot? The brain is the microprocessor, the PIC. You'll find more information about this in the electronics and software section.
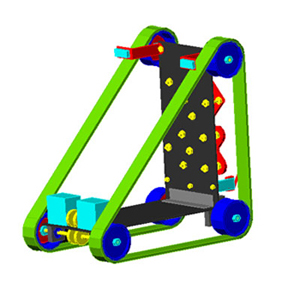
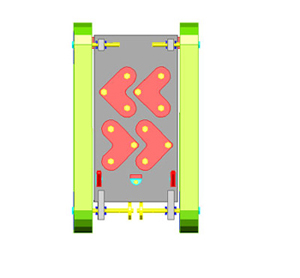
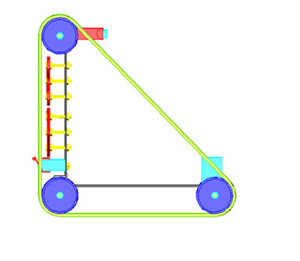
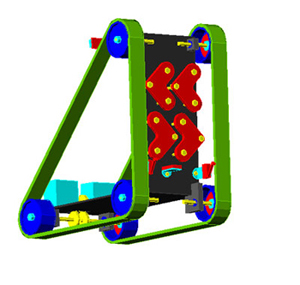
We started out with some CAD drawings, an artist's view on our Vertigo: