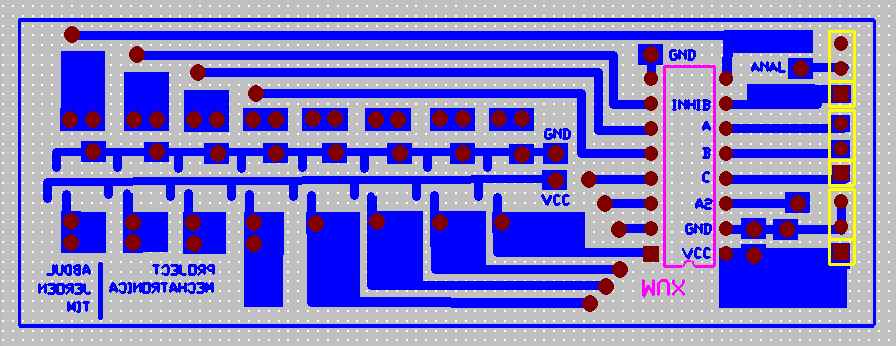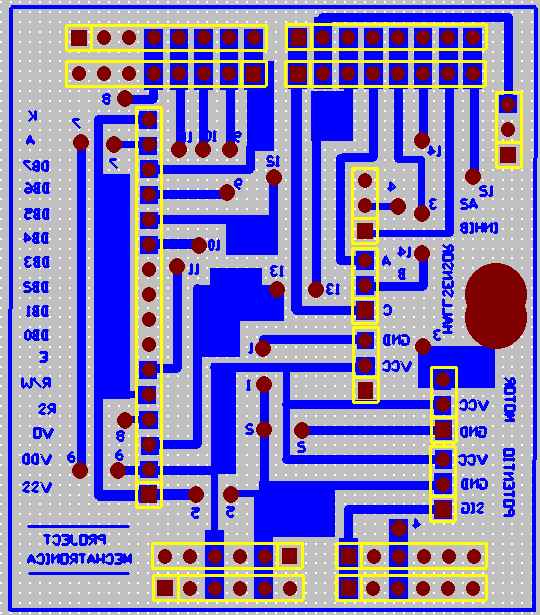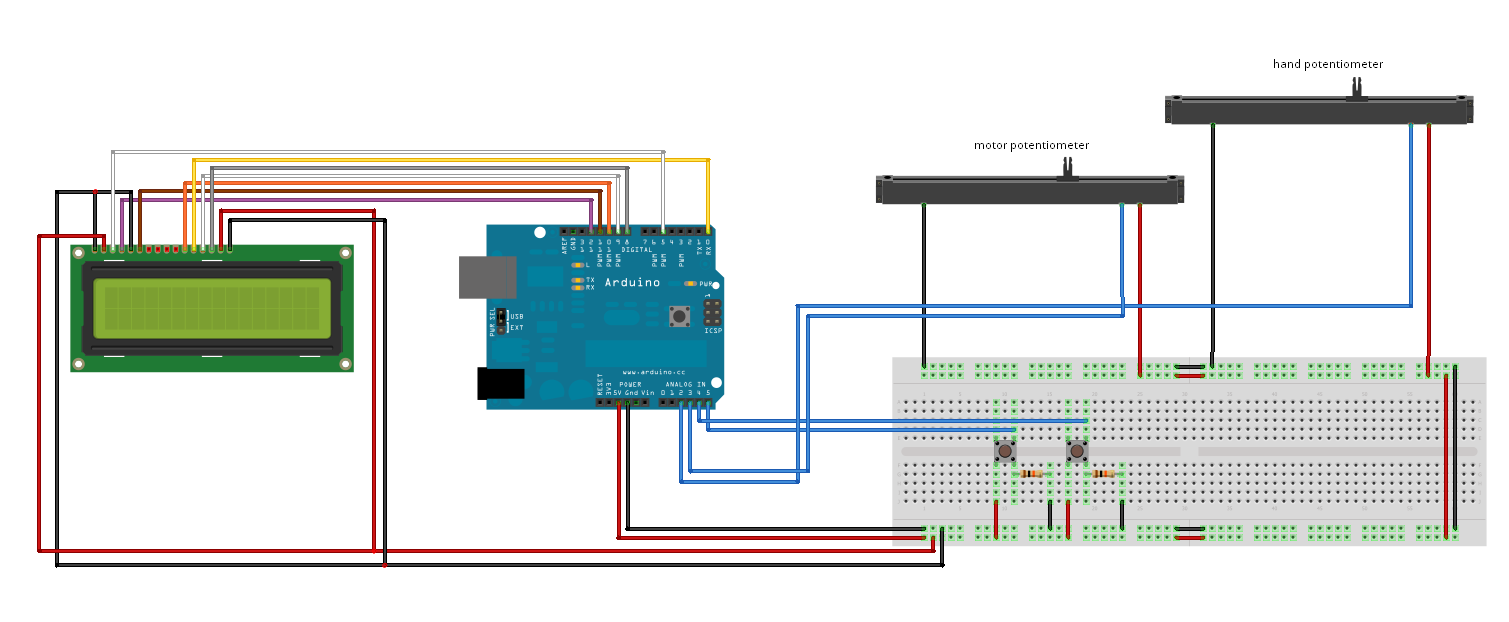
Click for large; made using Fritzing.
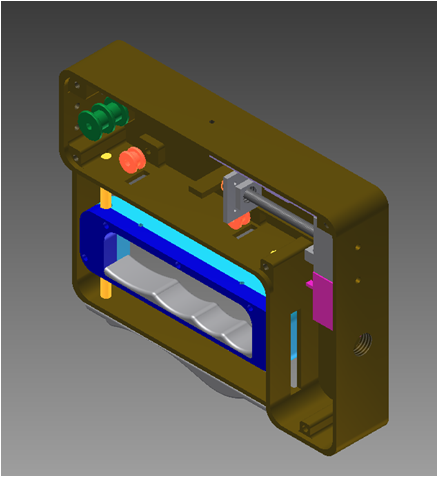
Inventor
PCBs: traxmaker
A total of three PCBs were designed: one for the combination of the Hall effect sensors and the multiplexer, one for use on top of the Arduino and one for pairing with the potentiometer.
About the design

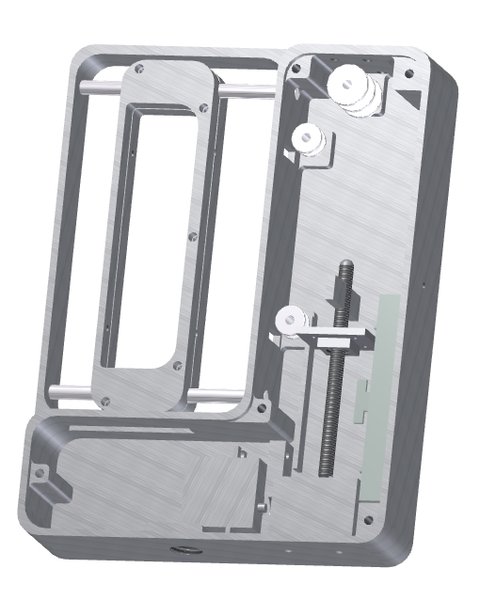
Base design
The robot core consists of the following components:
- Moving hand grip for the actual revalidating part.
- Hall sensors beneath the grip for tracking the position.
- Motor, transmission and screw for thriving the springs.
- Potentiometer for tracking spring position.
- The springs cabled via a pulley to the grip.
External connections
- Above: connection for the HD44870 LCD.
- Below: connection where a joystick can be attached.
Adjustments
In the final design, these adjustements were made:
- Hall sensors were replaced by another potentiometer
- The gearbox was replaced by the motor to drive the screw thread directly.
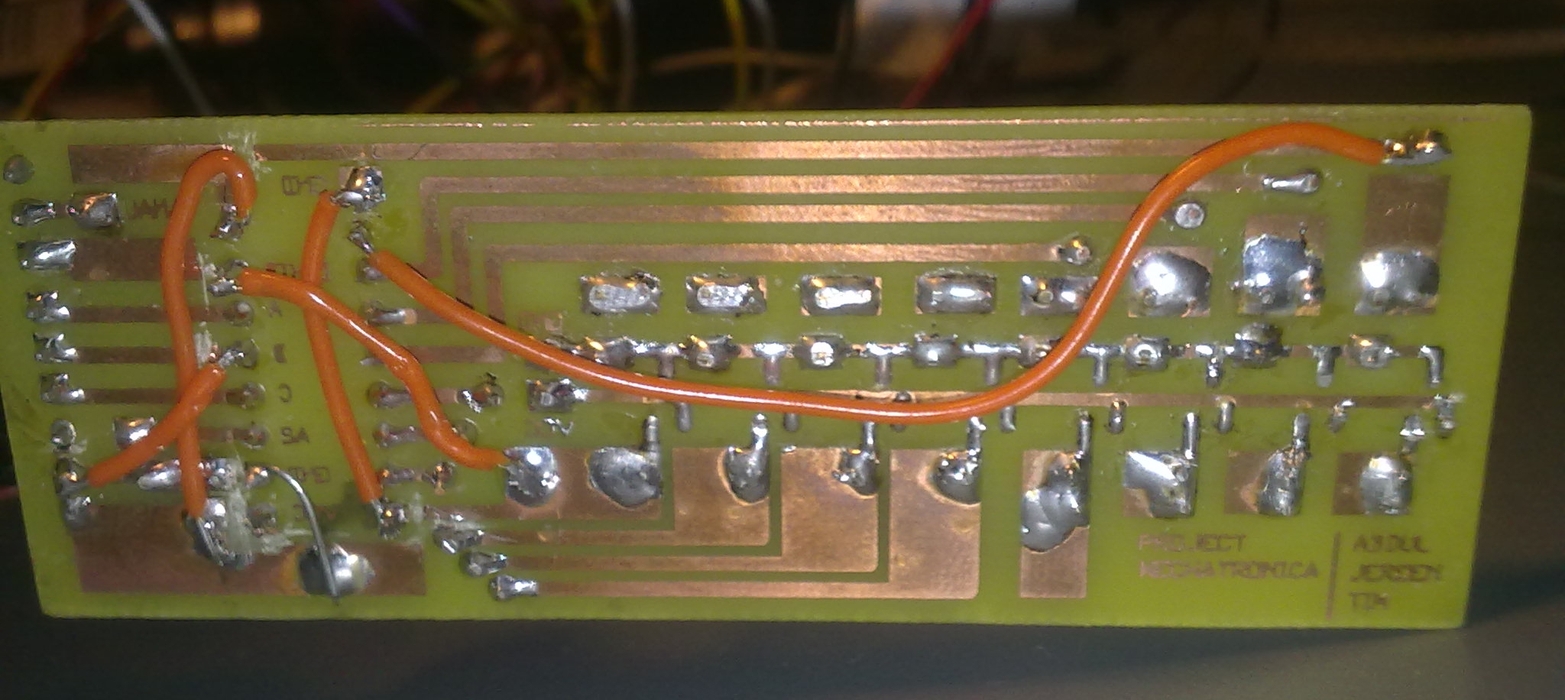
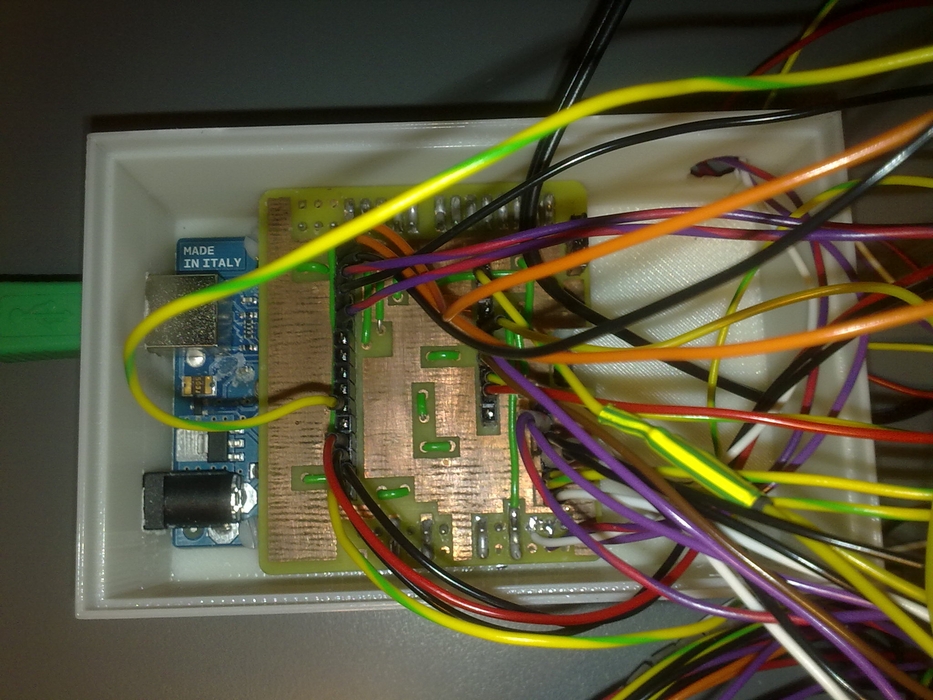
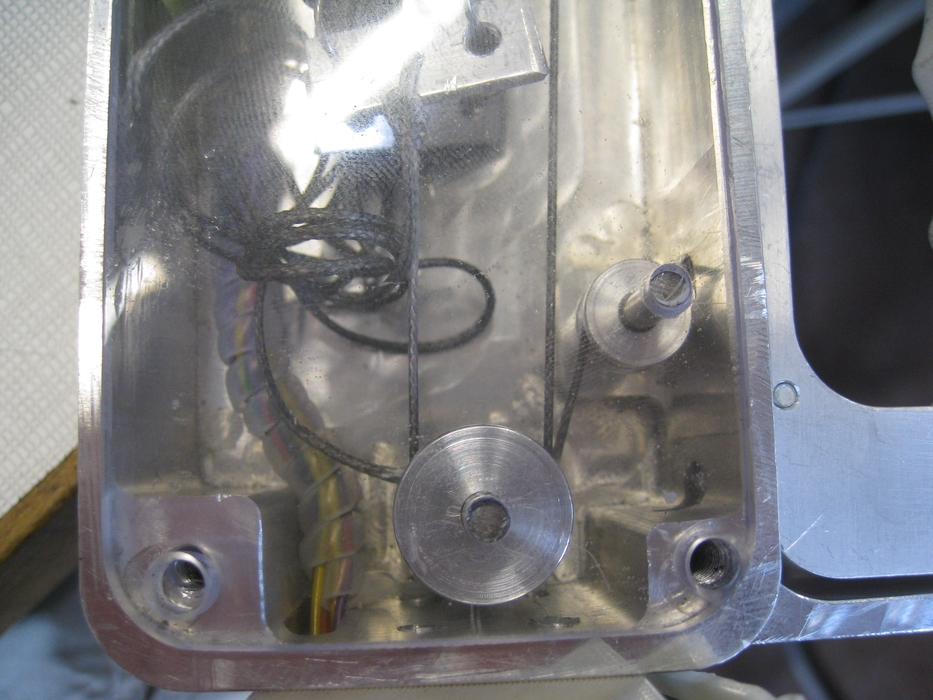
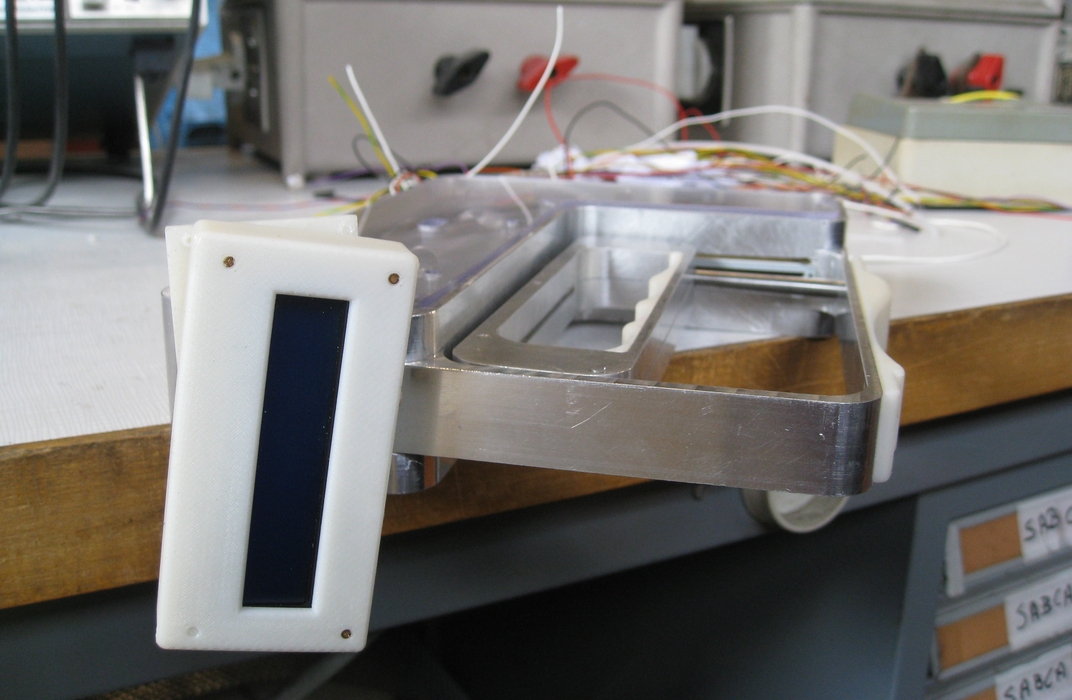
Design in reality