The different parts
The parts presented here were designed in CATIA V5R20 and all the files required to reproduce them can be found here.
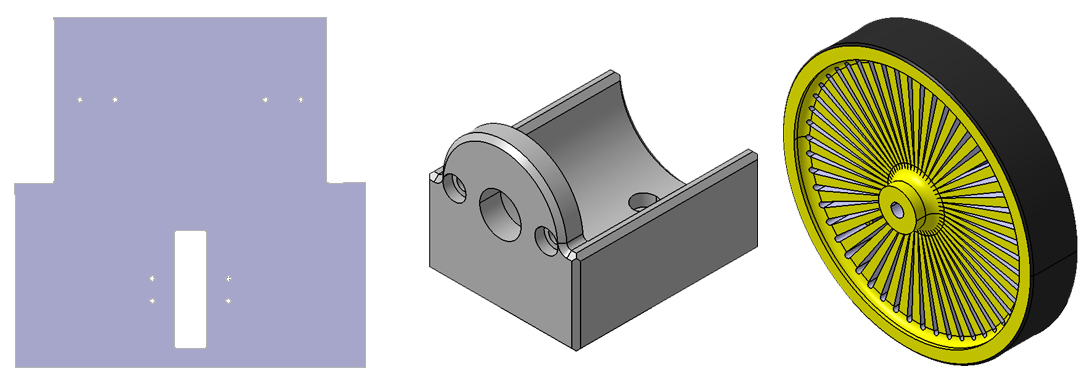
Base and supports, the first steps:
The first steps in designing the mechanical parts consisted in determining the propulsion mechanism that would set our robot in motion. In order to ensure effective and easy way to do so, we opted for a two dc-motor design, pushing the robot. The shape of the base and an effective way to mount the motors, was built using cad assistance:
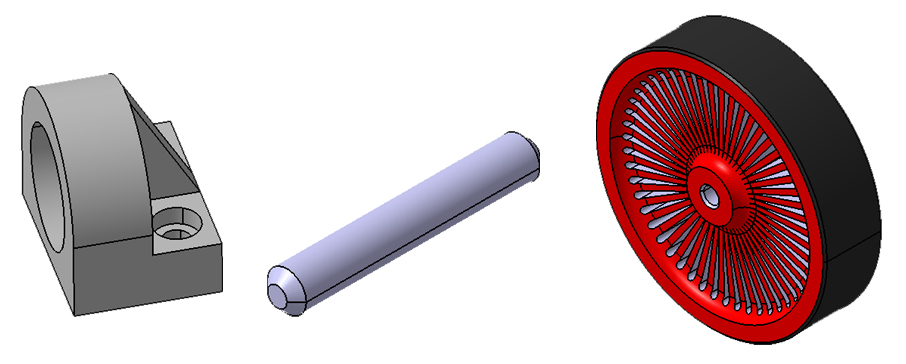
Front wheel:
A front wheel was required to keep the robot in balance. That's why two additional supports had to be designed, and a shaft and bearings required:
The body parts (external):
The robot had to be cheap and easy to assemble, so the team decided to go for a squared shape that would take the form of a Pikachu to appeal to other people. This way, the parts could be manufactured using the laser-cutter and cheap materials like wood, plexiglas or multiplex.
