TEAM1 - Project - Brachiationbot - 2012-2013
SPECIFICATIONS
On this section, you will find :
Firstly, a function analysis identifying the required functions to satisfy the statement.
Finally, the controlled functions responding to the function analysis.
1. Function analysis
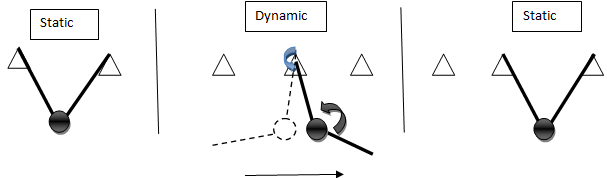
Take a look at the motion steps of a brachiation in Figure 1.
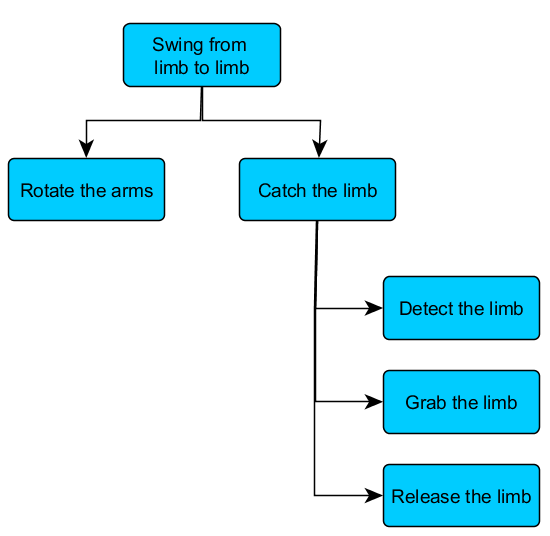
The following tree represents the main function and the subfunctions that have to be fulfilled (see figure 2).
2. Controlled functions
To achieve the open/close gripper function and the rotation between two arms function,
we need at least three servomotors were required. Two of them were used for open/close gripper function and the last one was used for rotating two arms.
Also, we need at least two sensors were required to signalize
when the gripper had to be opened or to be closed at a particularly state (more information see Electronics section).