The tasks that have to be done mechanically by the robot are: - A 2D translation insured by a 2 arms mechanism actuated by 2 servomotors.
- A downward/upward motion of the gripper and a grabbing motion. This will be insured by a created mechanism using only 1 servomotor.
Arms
The robot is a serial robot which consists of 2 joints (axis of rotation) and at the end a gripper is placed.
The 2D translation arms were provided from another project. It is based on articulated arms with 2 axis of rotation on a fixed plane, with a fixed arm length. The servomotors used have a workspace of 180 degrees, this provides a good workspace. At the end of the arms, a gripper is placed. The whole system has a sort of cylindrical workspace with articulated arms.
The gripper was developed as the following video:
Gripper
The gripper used is a partial form fit (an encompassing jaw) with clamping force.
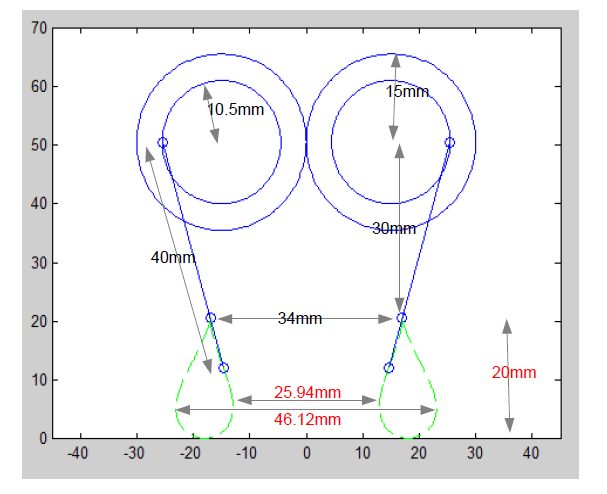
The gripper's parameters were determined using a matlab simulation. The fixed parameters were the biggest gap (ΔXmax) and smallest gap between (ΔXmin) the clamps which should be respectively bigger than 2.5 cm and smaller than 2.5 cm. Another design parameter was the height between the lowest point and highest point reached by the end of the clamp when the gripper is in action: the lowest point should touch the board (not too much), the difference in height should be bigger than the height of 2 pieces. This way when we catch a piece, the gripper will not touch another piece and displace it from its position while moving to the end position.
Those parameters were fixed, and a series of the other parameters were established on basis of these constraints. From the data that we required we tried to choose the parameters that gave us nice round numbers and satisfied the requirements.
The real mechanism has also springs between the ends of the gripper before the clamps. This allows certain stiffness in the mechanism, and a better functioning of the gripper. This allows a high reproducibility of the gripping. Many tests were performed on the gripper and the results were positive. Here is a picture of the gripper:
The shields were created using the 2D cutter at the EHB, and the other parts were modified in order to reduce the slack. The stick is in a U shape, this way it cannot rotate and the clamps stay facing each other. The required servomotor should be able to rotate 180 degree at least to perform the required movement.
Assembly
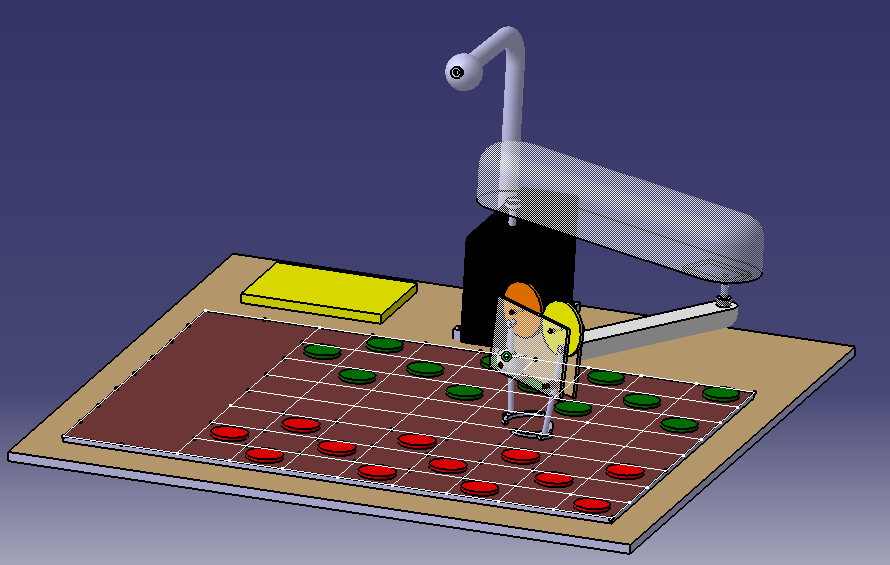
The assembly of the whole system was done in Catia. Here is a picture of the Catia model:
The real system:
The webcam's height was determined experimentally in order to cover the whole board and to obtain good visibility of all the pieces. Tests regarding image processing will be explained later.