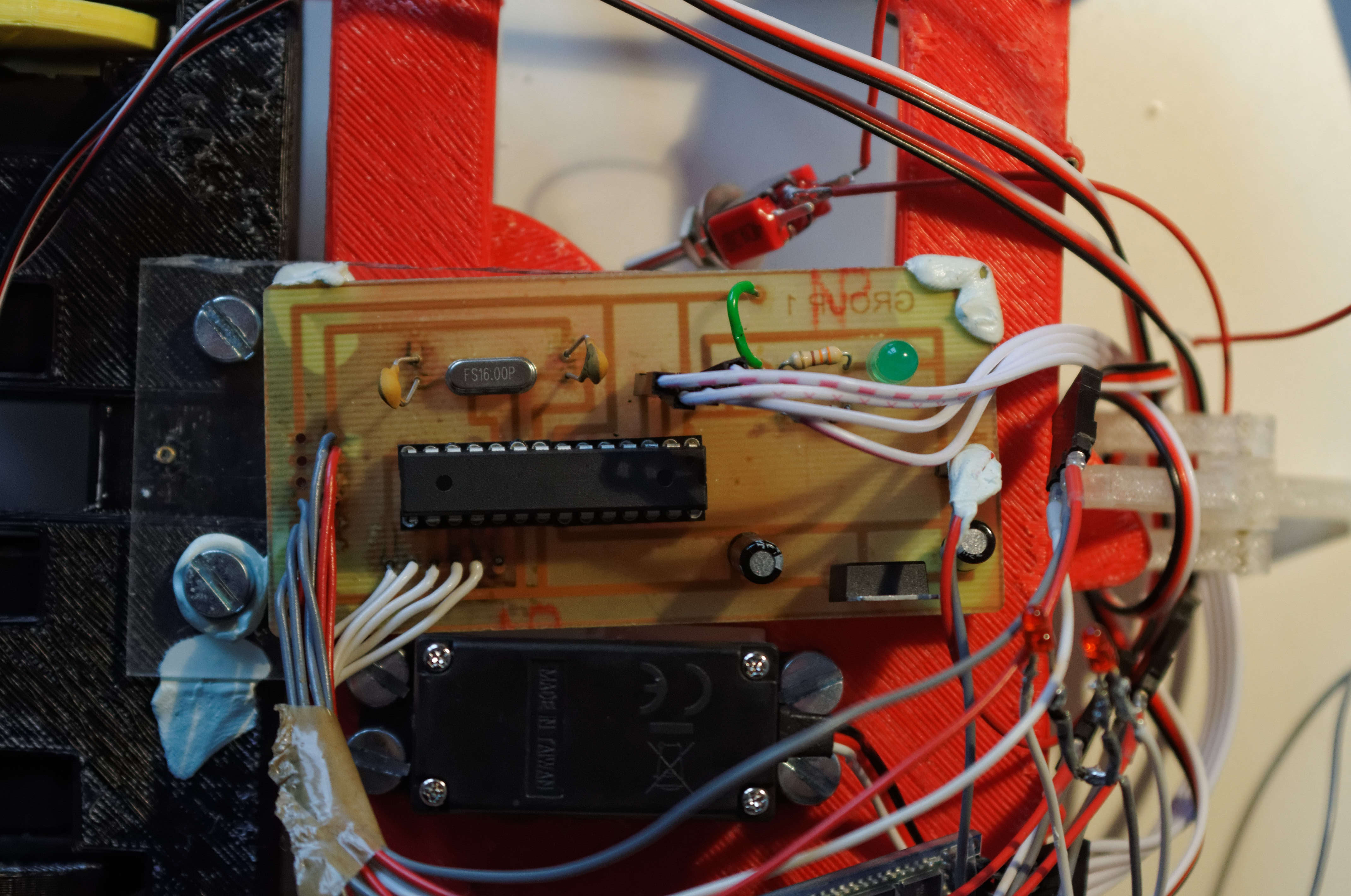
Robot Electric Components
The robot has three main parts: The motors, the control of them (PCB) and the power source. Given that we have already explained on the PCB part how does it work, there is only left the motors and the batteries.
Motors: Servomotor
The servo motors are ideal to the robot we built, because they have a limited rotation speed and can be controlled easily. Thanks to their gear box, they can also provide high torque with small power, so this was the best choice between all the motors in market.

They also have an inconvenient, which is that they are normally bounded to a certiant rotation angle. This means that they can only rotate above 360 degrees and then they reach their maximum. To avoid this problem, normally students hack them, but in our case, we bought a continous rotation servomotor for the same price as the cheapest servomotor.
This continous speed servomotors work differently than custom servomotors, so while programming them we took into account this other way of working. To control them you must send a control input step during a limited time, and depending on the lenght of the step, they will turn at a certain speed. In our servomotors, if you send a step of 1500ms then they stop. If you send a larger step, they will turn forward and if the singal lasts less than 1500s then the servomotor qill turn backwards.
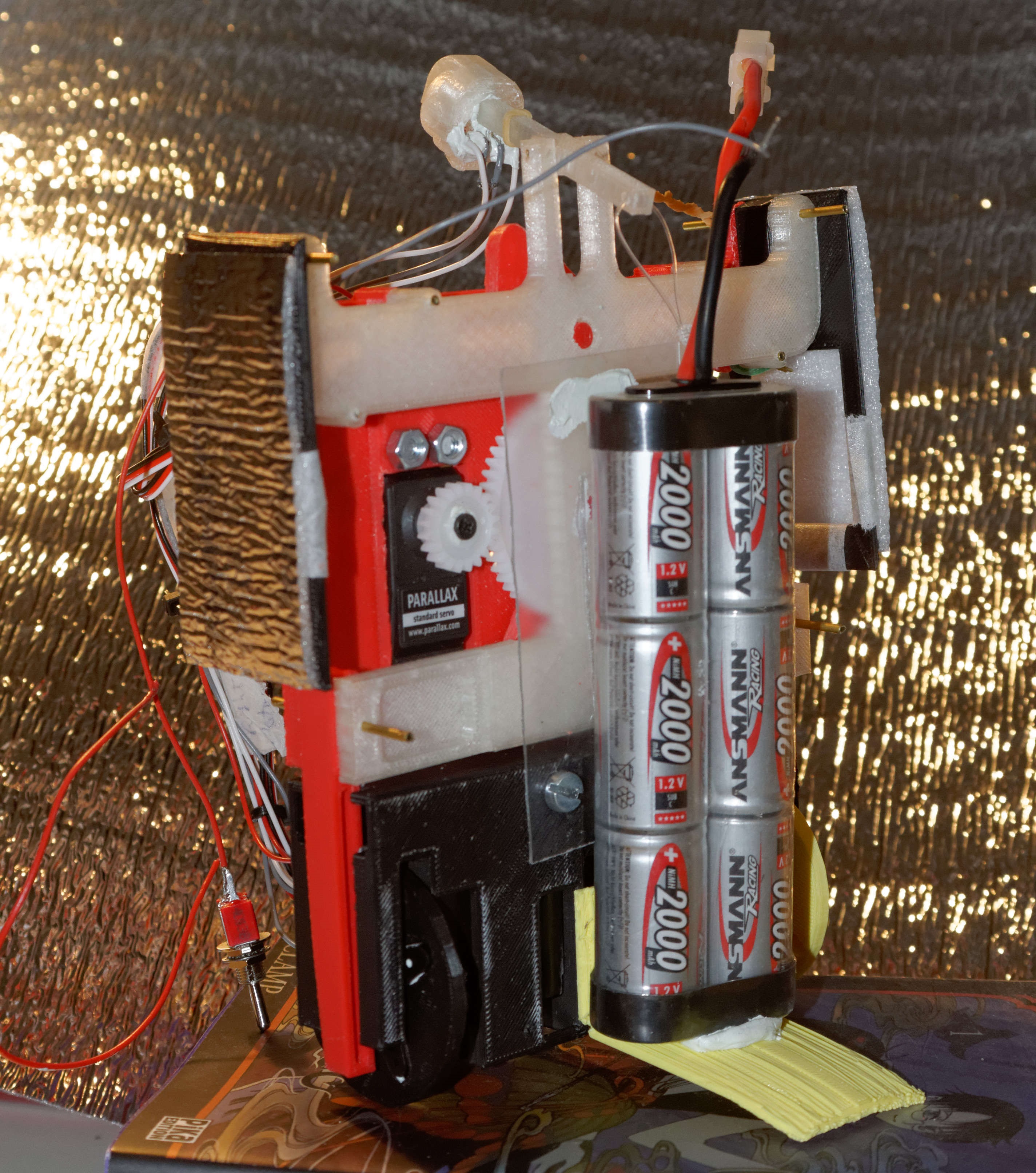
Battery: 7.2 V
Normally, arduinos can work with 5 volts, but 5V batteries normally provide less than the nominal voltage, and given that we also wanted a constant regullar torque for the motors, we decided to increase the voltage to the next family of batteries, the 7.2V. With this battery and the voltage regulator, it is possible to ensure a strong and stable 5V power to feed the arduino and the servomotors.
About the requirements of the mAh, with the servomotors specifications, we saw that the sevomotors consume high power, so the battery had to be able to provide high intensity to make the servomotors work at full efficiency. After a long search, we finally found a battery which could fullfill all the requirements for a low price, which is the one of the following picture:

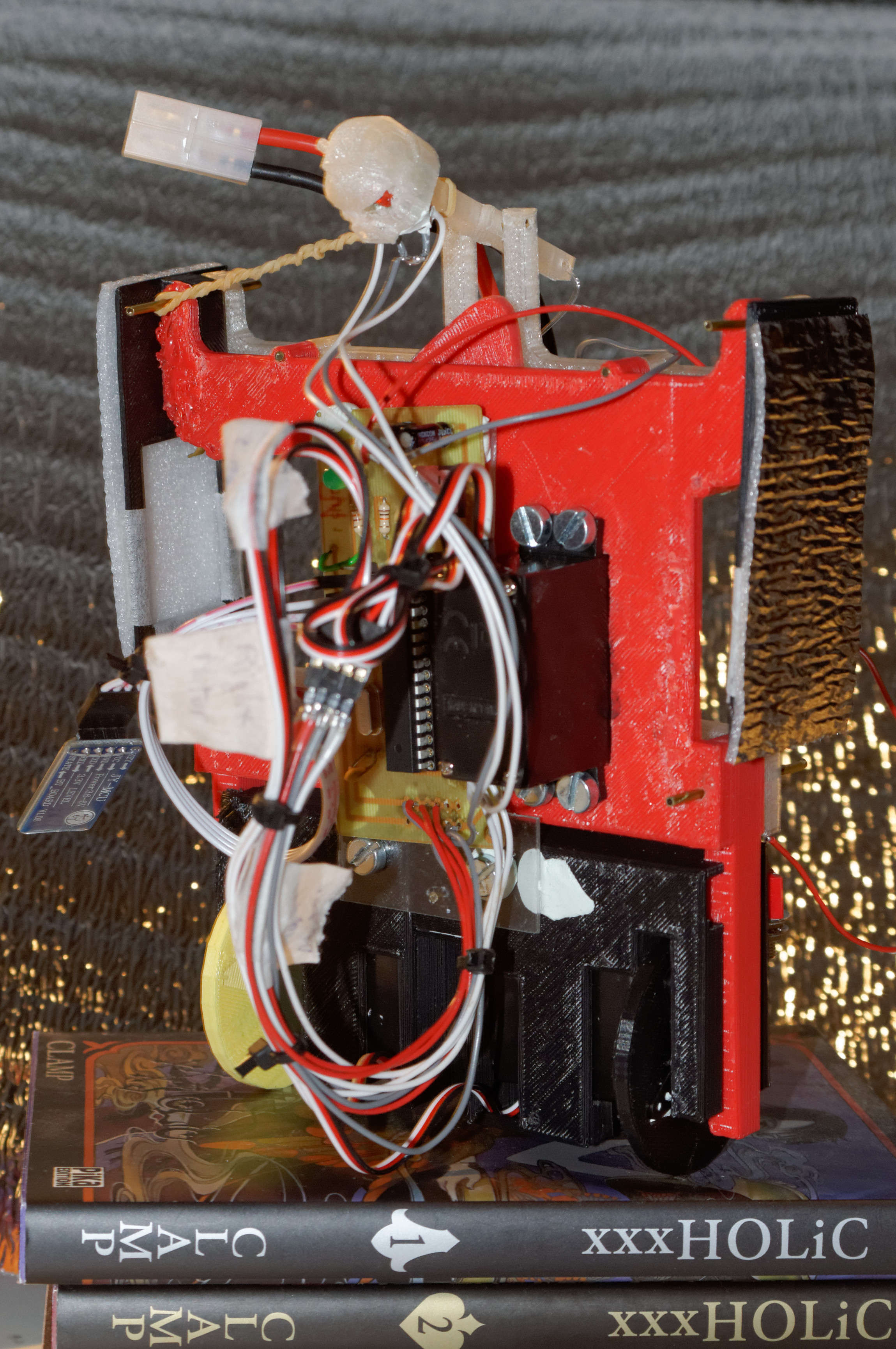
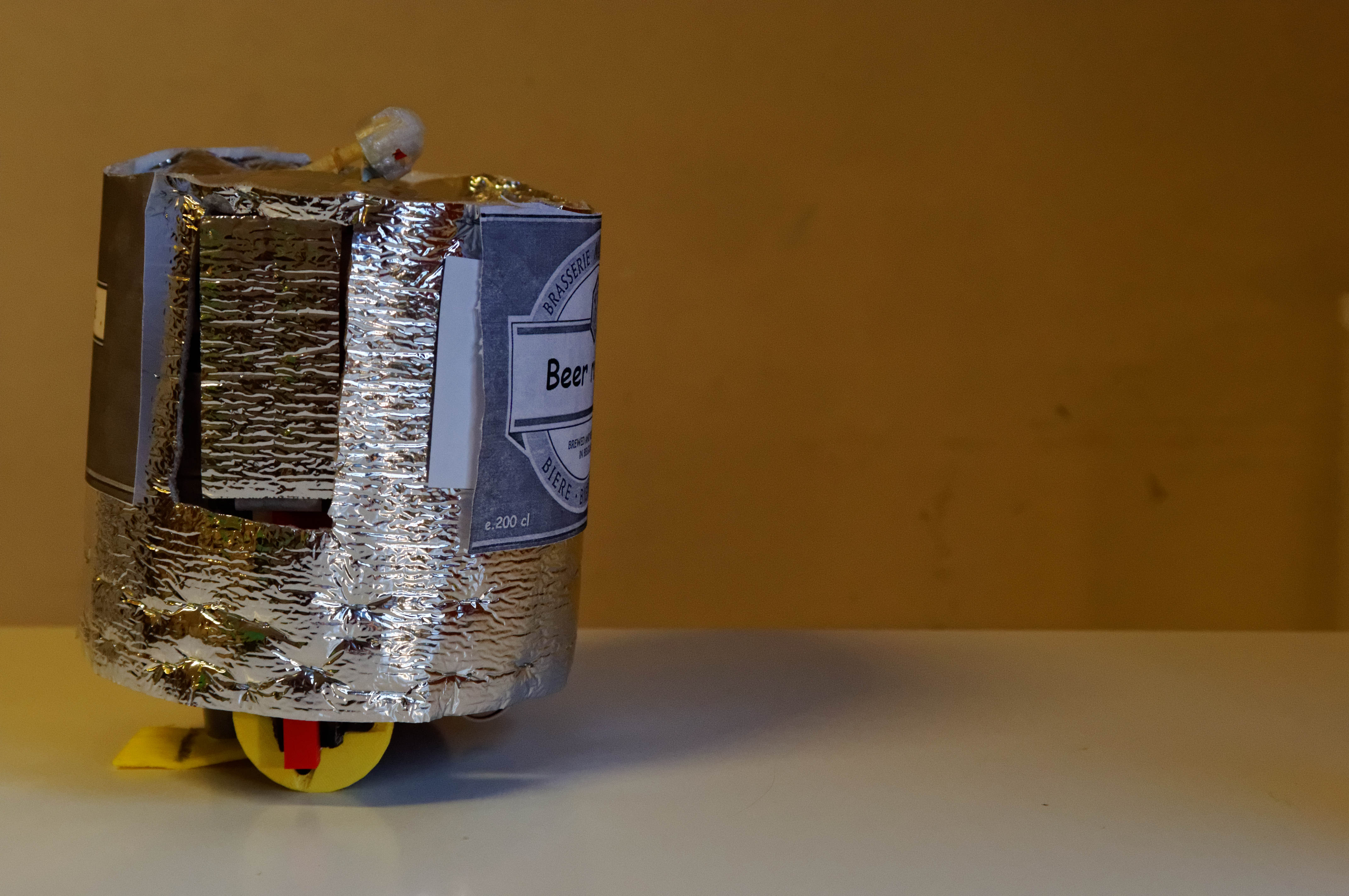
Parts and Final Robot
But before that here are few pictures made during the project showing the different elements
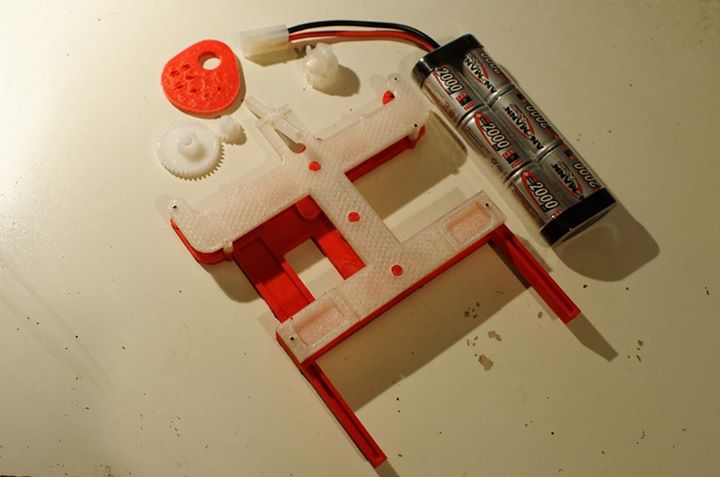
.jpg)