Electronics
Sensors
We use three infrared sensors to detect front,right and left distance to the walls. Photo-resistor is used to detect white color.
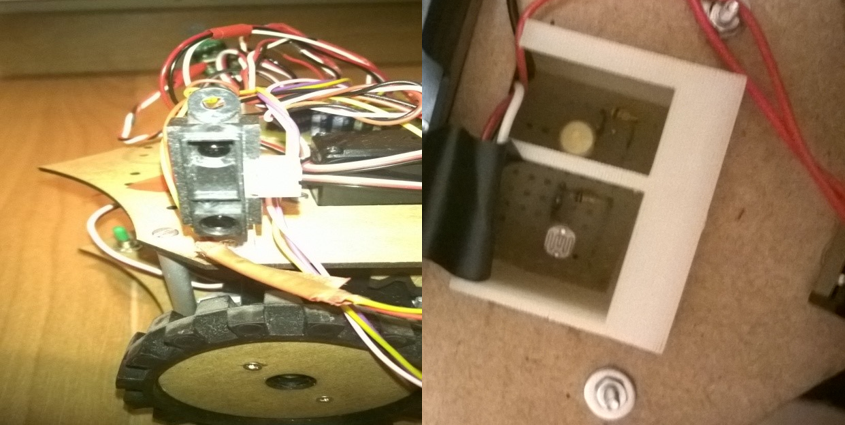
Actuator
One servo is used for gripper and two hacked-servo motors with continuous rotating for drving robo

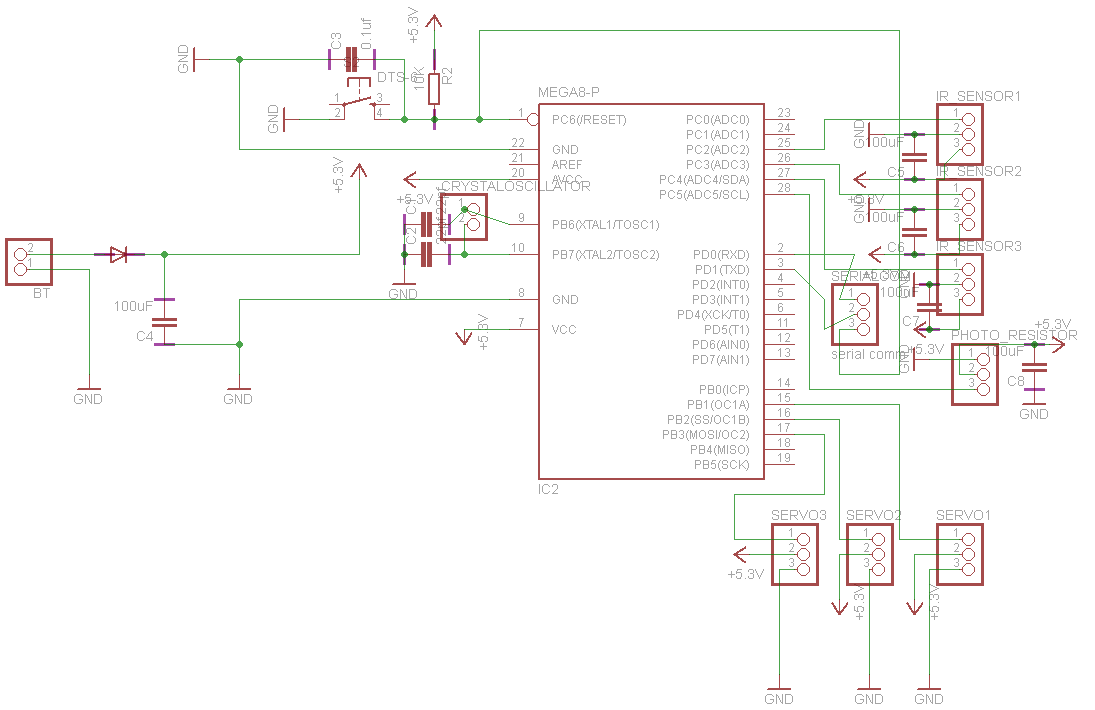
Schematic design
- The power supply is 6V battery, so the diode is used to reduce the voltage source to 5.3V.
- The reset button and power reset.
- The 16MHz crystal for microcontroller
- Analog input pins are connected with sensors, digital output pins are connected to servos
- The capacitors are added between power and ground to stabilize the voltage source.
- The receive, transmit, reset pins are connect to 3 jumper for serial communications.
- The microcontroller of project is Atmega 328.
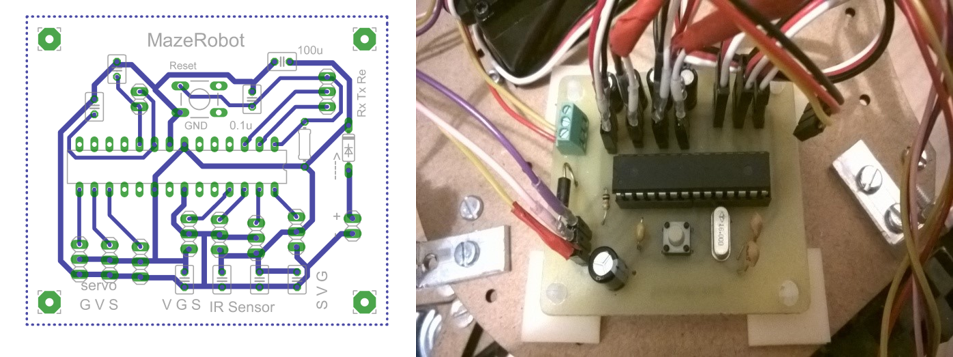
PCB
- One layer PCB is designed by Eagle software for the project.
- Wire thickness: 20-25 mils for signal wires while 35 mils for powers and ground wires Wire clearance: 20 mils