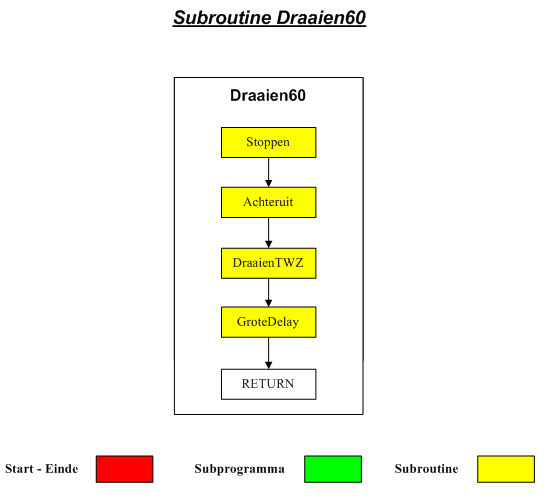
Draaien60 This subroutine is called by the 'ground algorithm'. When Vertigo detects a white wall, he will stop, back up, turn about 60 degrees and start moving forward again.
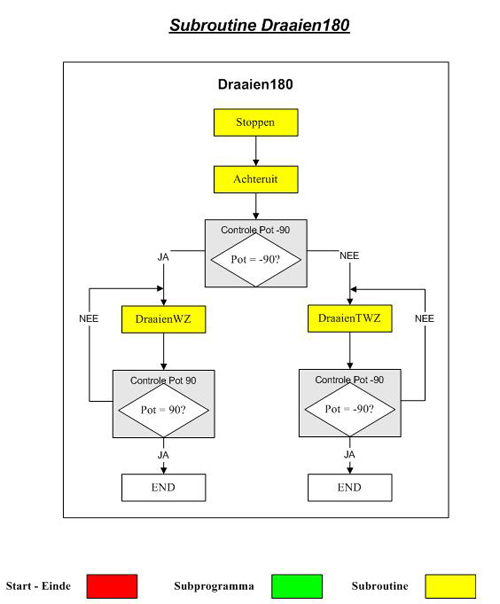
Draaien180 This routine is called when the robot is on the wall, facing a side and all three of the light sensors in front are active. This means Vertigo is very close to t side of the wall and he will turn 180 degrees. Depending on Vertigo's orientation, he will turn either clockwise or counterclockwise.
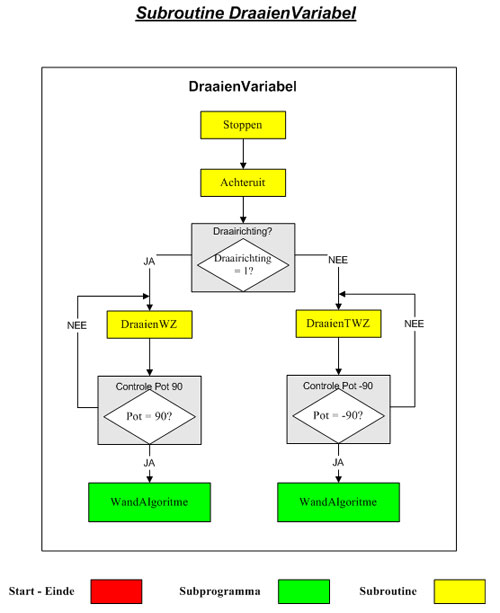
DraaienVariabel To make sure Vertigo doesn't always turn to the same side, we predefined several different cases. When Vertigo's right front light sensor detects an object, he will turn counterclockwise. When the front left light sensor detects something, he will turn clockwise. We went through all this trouble, just to make sure that Vertigo will reach the top of the wall as fast as possible. For the same reason we wrote draaienVariabel. This procedure remembers what way Vertigo turned last, and uses this information to decide which way to turn when two of the front light sensors become active.