Vrije Universiteit Brussel
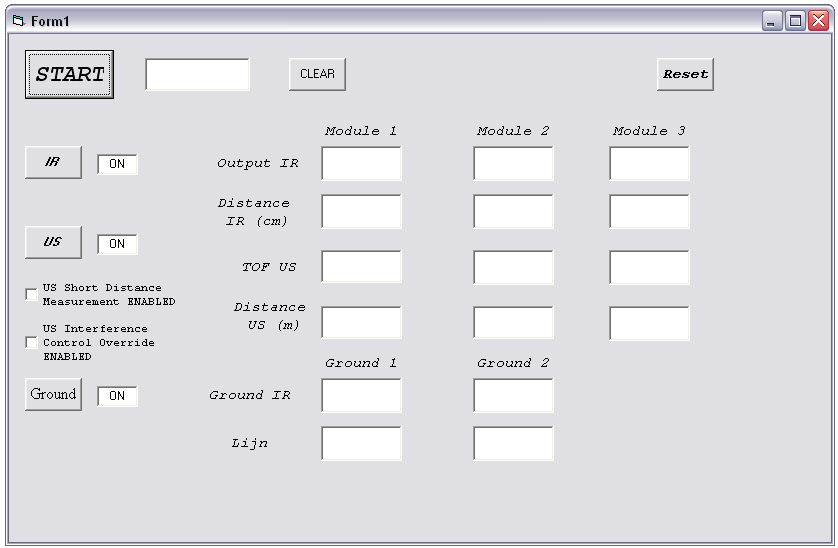
GebruikAlgemeenMet behulp van het programma Visual Basic werd een interface gemaakt via dewelke de gebruiker gemakkelijk kan communiceren met de robot.
In eerste instantie kan er gekozen worden voor US short distance
measurement of US interference control override door de gewenste
optie aan te vinken. Wanneer US short distance measurement aangeduid
wordt, wordt ervoor gezorgd dat de metingen van de US sensor ogenblikkelijk
plaatsvinden. Dit heeft als risico dat er signalen ontvangen worden
die veroorzaakt worden door de uitgezonden golf die het membraan
laat trillen. Bij deze metingen worden de signalen van de twee
sensoren niet tegelijk ontvangen in tegenstelling tot het geval
dat de US interference control override aangevinkt wordt. Wanneer
geen van beide opties aangeduid worden, wordt er na het uitzenden
van een golf een tijdje gewacht alvorens een meting uit te voeren.
Door op de knop met opschrift IR, US of GROUND te klikken kunnen
respectievelijk de infrarood-/ultrasoon-/grondsensoren in werking
gesteld worden. Wanneer vervolgens op ‘START’ gedrukt
wordt, worden de metingen gestart. In het tekstvak naast de startknop
verschijnt de duur (in seconden) van de metingen in beeld. Wanneer
de metingen stopgezet moeten worden, dient er op de knop STOP
(dit is dezelfde knop als de startknop: eens de metingen plaatsvinden,
verandert de naam in STOP, als er niets gebeurt staat er START)
geklikt te worden. Er is ook een CLEAR en een RESET knop voorzien
met de functie die aangegeven wordt door de naam. |
©2004 • Vrije Universiteit Brussel • Pleinlaan 2 • 1050 Elsene • Tel.: 02/629.21.11 • info@vub.ac.be