Vrije Universiteit Brussel
HardwareAlgemeenAlvorens de werken aan te vatten, werd de thesis: ‘Robotics:
Design and implementation of a modular sensor setup’, geschreven
door Guillermo Moreno Gabriel gelezen. Dit document stelde ons
in staat de mobiele robot die tijdens het academiejaar 2004-2005
ontwikkeld werd, te begrijpen.
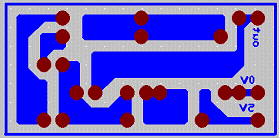
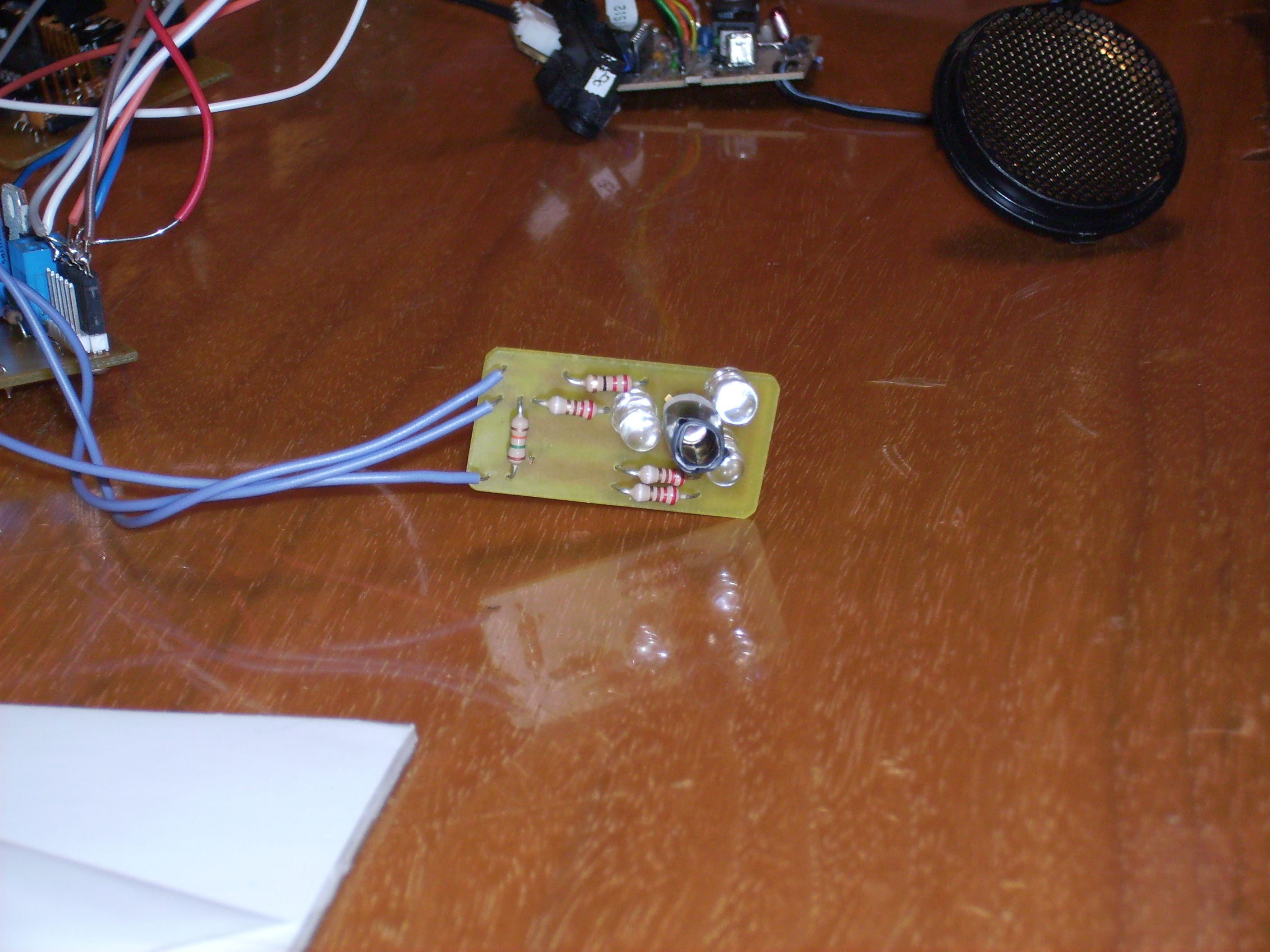
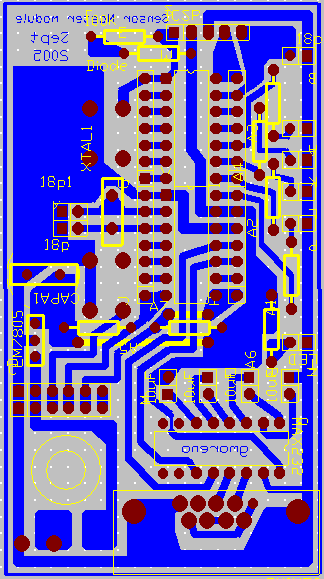
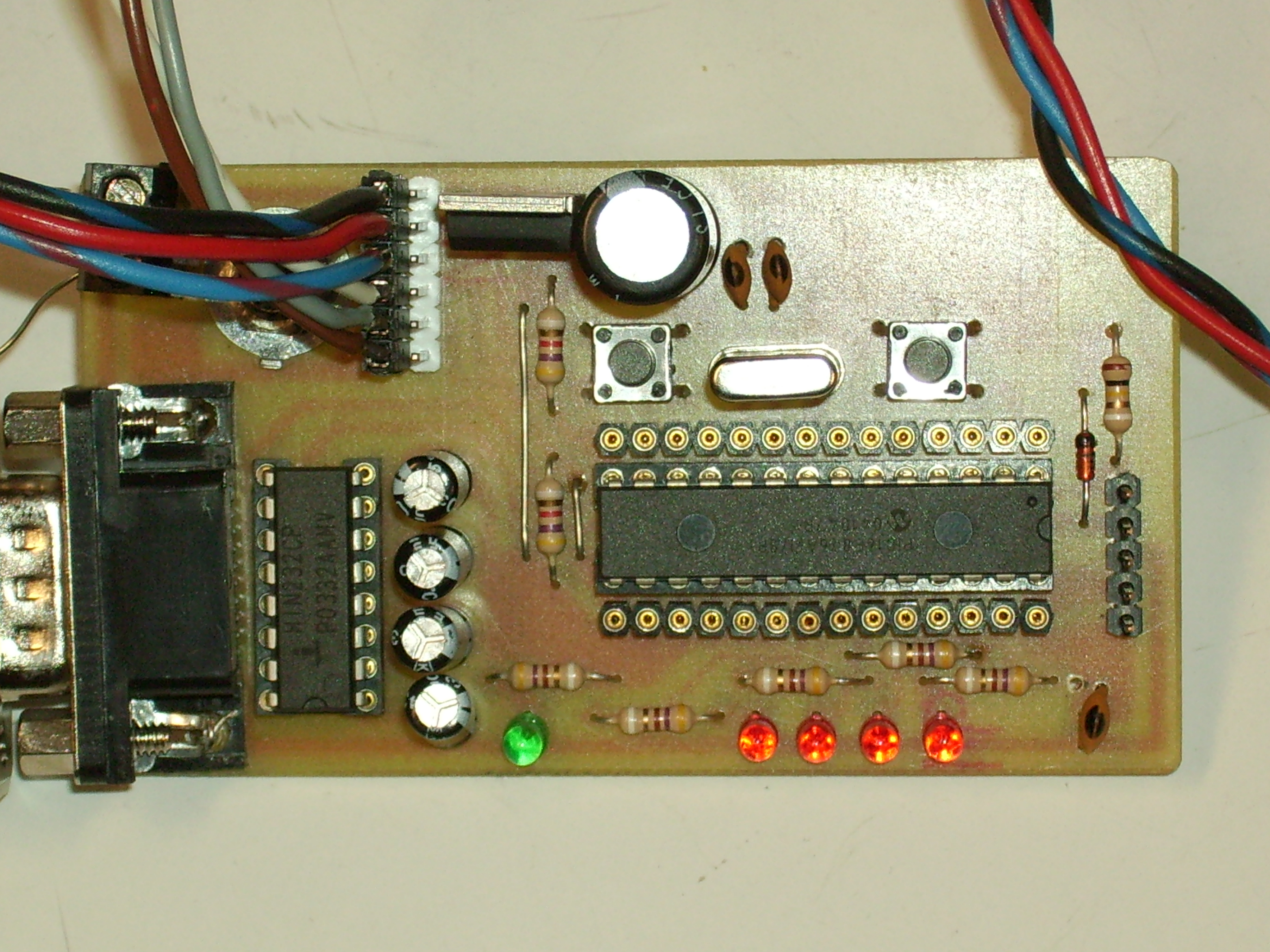
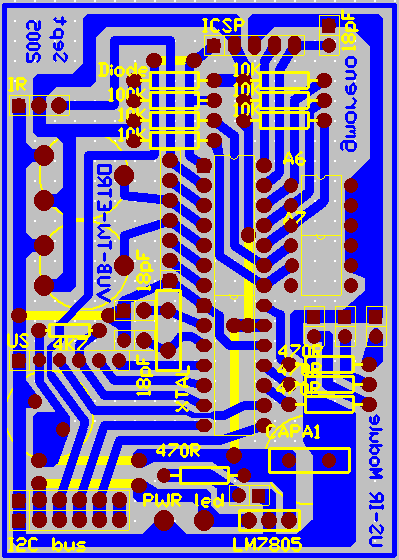
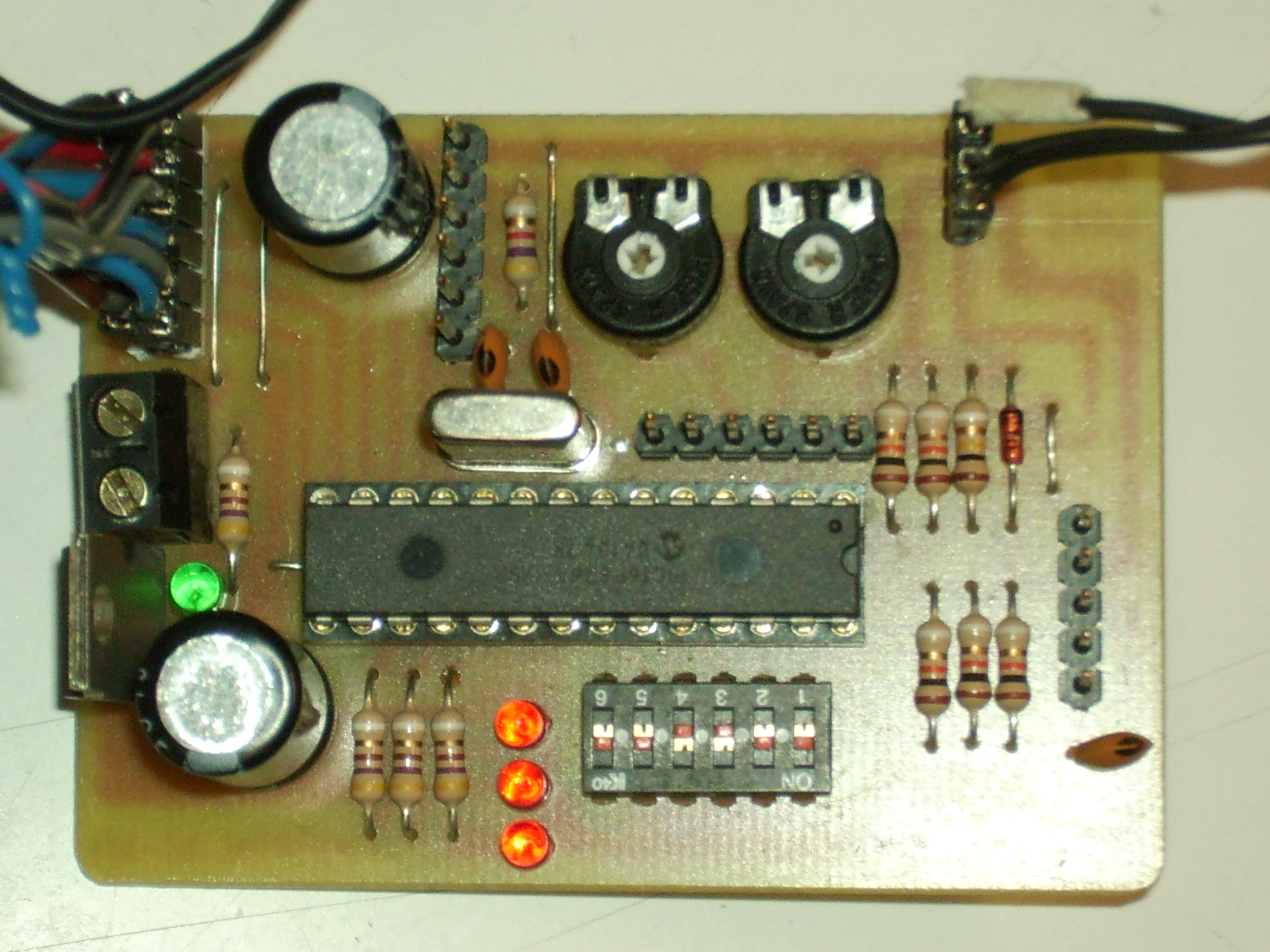
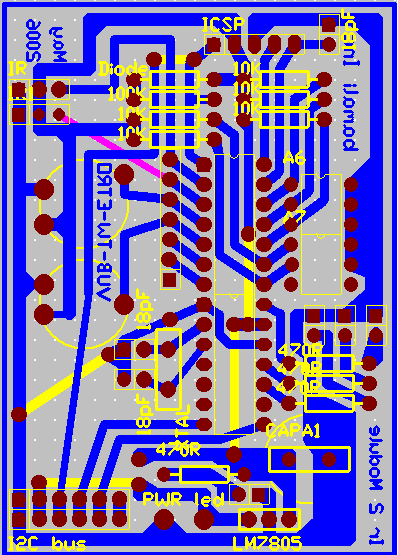
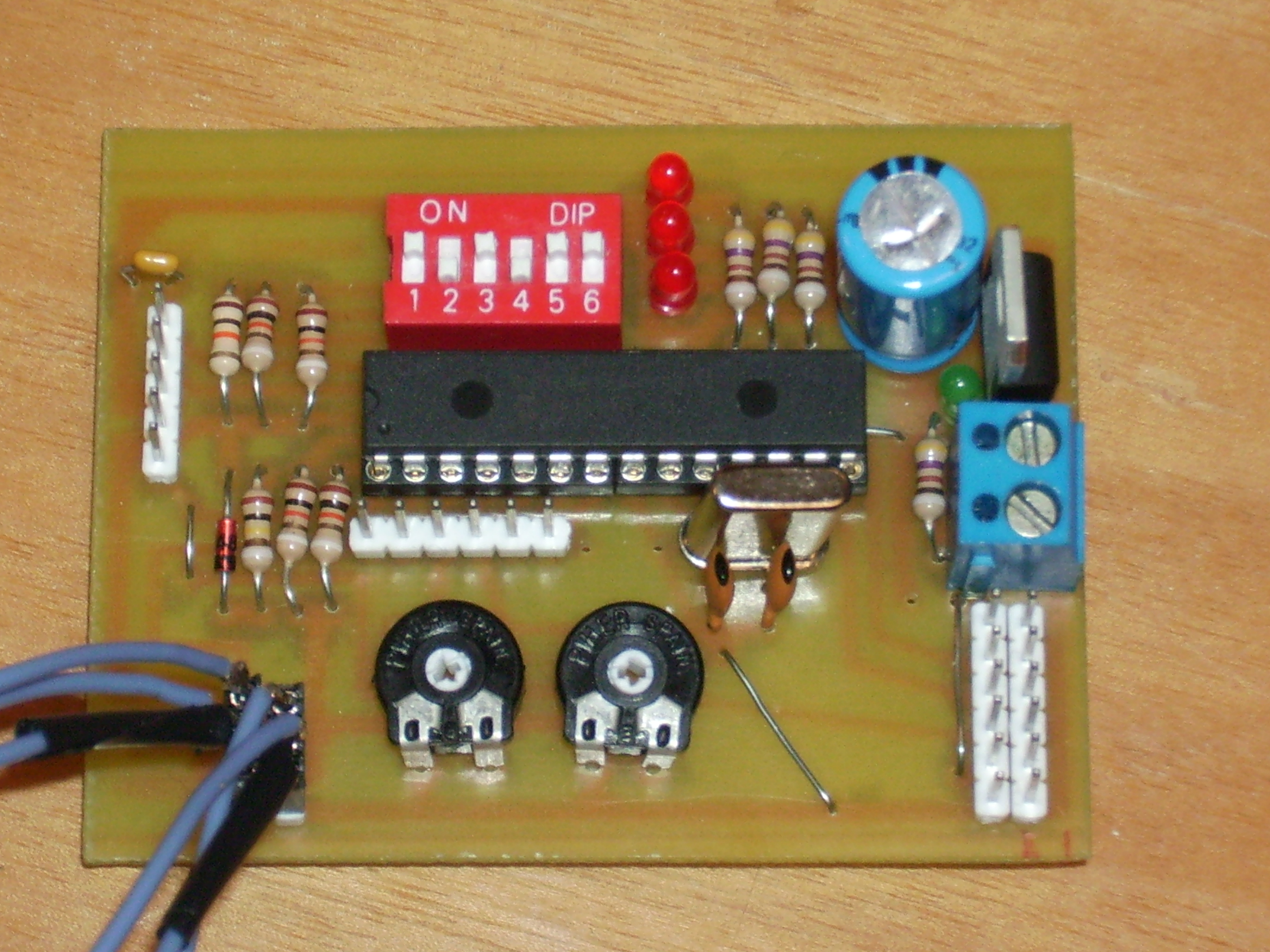
Deze schakeling bevat drie infrarood LED’s, een fototransistor en vijf weerstanden. Er wordt telkens een weerstand van 220 Ohm in serie met een LED geschakeld om de stroom die door de LED vloeit niet te groot te maken. Een vierde weerstand (22 Ohm) zorgt voor een spanningsval en een vijfde (15 kOhm) vormt samen met de fototransistor een spanningsdeler. Deze hele constructie maakt het mogelijk een outputsignaal dat varieert tussen 0V tot 4,3V, afhankelijk van de reflectiegraad van de ondergrond, te krijgen. Dit signaal kan via de PIC van een analoog naar een digitaal signaal omgezet worden. Eens de schakeling gekend was, kon deze in traxmaker getekend worden (dit bleek niet zo gemakkelijk als gedacht omdat er ook niet op alle computers de mogelijkheid was een document in traxmaker op te slaan). De sensoren worden vervolgens elk aan hun bijhorende slave-module gekoppeld, die in verbinding staat met de master-module via een I2C BUS. De I2C BUS (Inter-Integrated Circuit) is een two-wire seriële bus die een 8-bit georiënteerde bi-directionele gegevensoverdracht toelaat. De hoofdcomponent van de slave-modules is een PIC 16F876A microcontroller, waar het programma dat in assembler geschreven werd, ingeladen wordt. De reden dat gekozen werd voor deze microcontroller is het feit dat hij ingebouwde ondersteunende hardware voor de I2C BUS heeft, dat het aantal in- en uitgangen voldoende is en dat het programmeerbare geheugen groot genoeg is. De master-module zorgt voor de communicatie tussen de sensormodules en de PC.
De Slave modules voor de US en IR-sensoren die een voorwerp op een bepaalde afstand kunnen detecteren, waren reeds aanwezig (zie thesis van vorig jaar). Onze taak bestond erin ook een slave-module voor de grondsensoren te ontwerpen, de code daarvoor te schrijven en de mastercode zodanig aan te passen opdat het geheel kan werken. Ook het programma in Visual Basic diende aangepast te worden. Voor het ontwerpen van de slave module die bij de grondsensoren hoorde, konden we ons baseren op die van de IR en US sensor die reeds aanwezig was. Na de nodige veranderingen kon ook deze module in traxmaker ontworpen en vervolgens gesoldeerd worden.
De Slave module met de grondsensoren werd grotendeels gebaseerd op de reeds bestaande Slaves. Het gedeelte van de communicatie tussen US-sensor werd weggelaten en in de plaats kwam er een extra drie pin connector. Deze wordt zoals de reeds bestaande drie pin connector verbonden met de grond en de voedingsspanning. De derde pin wordt nu verbonden met de tweede analoge input van de microcontroller, AN1. Hierdoor was er een kleine aanpassing nodig in de analog setup van de microcontroller, het analoog maken van deze ingangpoort.
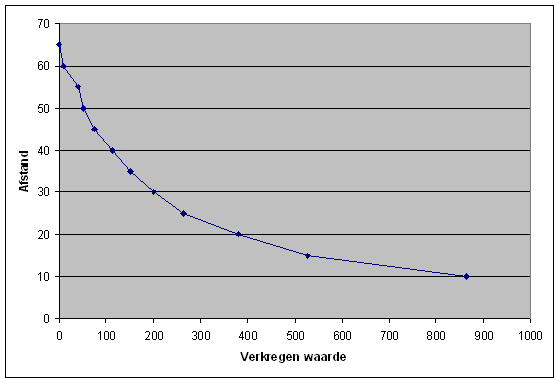
Vermits de waardes die in Visual Basic opgevraagd worden, nog geen afstanden zijn, dient nog een verband gezocht te worden tussen het toekomende signaal en de afstand tussen de sensor en het te detecteren voorwerp. Voor de US sensor is het inkomend signaal de time of flight (TOF) en kan de relatie tot de afstand uitgedrukt worden met behulp van de volgende formule: afstand = c * TOF / 2 Het verband tussen het signaal van de infraroodsensor en de afstand tot het object wordt experimenteel bepaald, volgende grafiek werd bekomen.
Door gebruik te maken van deze verbanden kan in Visual Basic
de afstand tussen de robot en het voorwerp weergegeven worden.
Werkingsprincipe sensorenHet werkingsprincipe van een ultrasoonsensor is gebaseerd op
het meten van de time of flight (TOF) van de ultrasoongolf. De
uitgaande golf wordt opgewekt door een, via elektrische pulsen,
geëxciteerd membraan. Wanneer deze golf reflecteert op een
voorwerp, wordt hetzelfde membraan terug geëxciteerd door
de terugkerende golf. Vermits de golf beweegt met de geluidssnelheid,
kan de afstand tussen de sensor en het object berekend worden.
Er dient opgemerkt te worden dat de geluidssnelheid afhankelijk
is van de temperatuur. Infraroodsensor: |
©2004 • Vrije Universiteit Brussel • Pleinlaan 2 • 1050 Elsene • Tel.: 02/629.21.11 • info@vub.ac.be