The Maze
The building
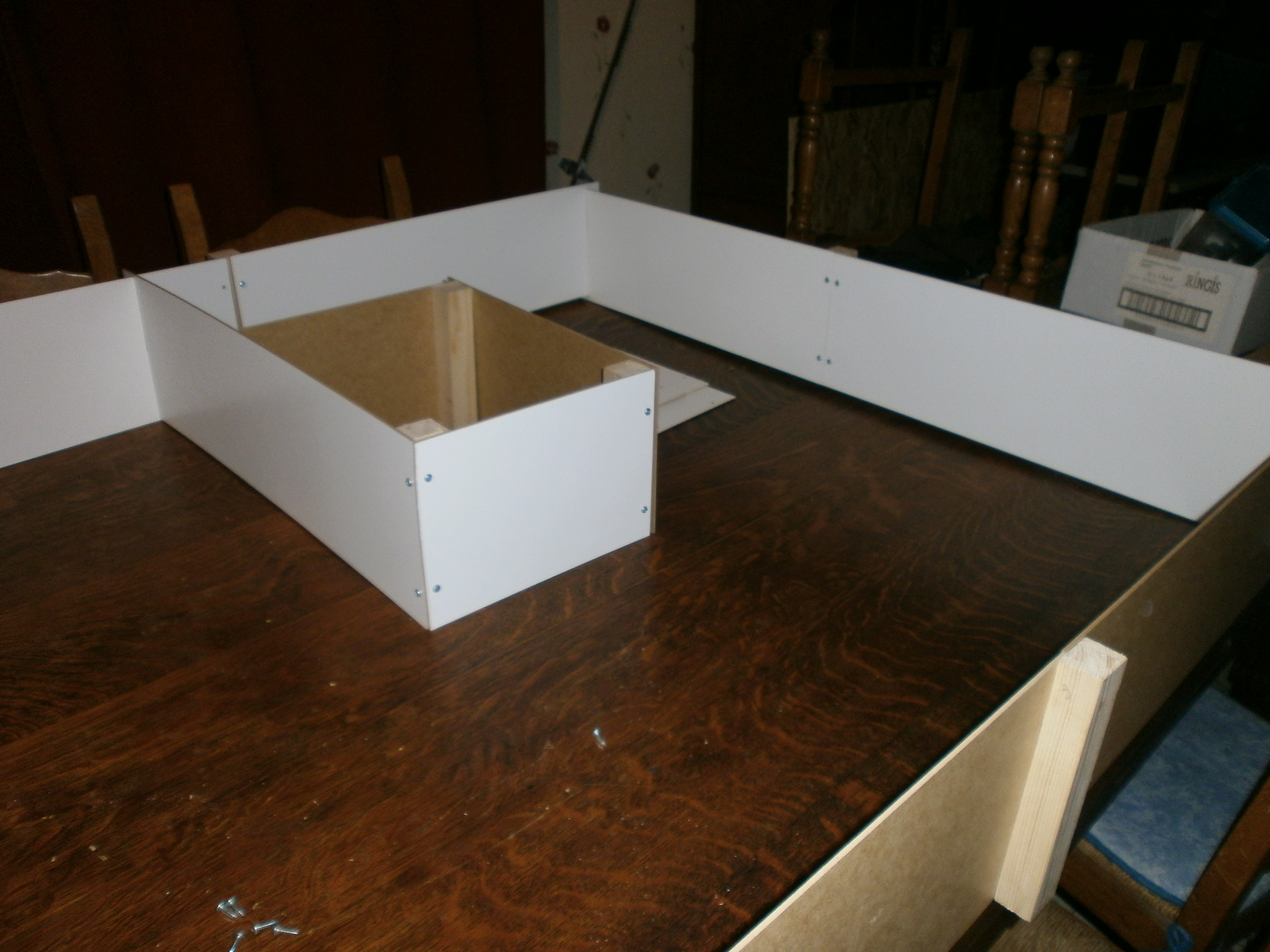
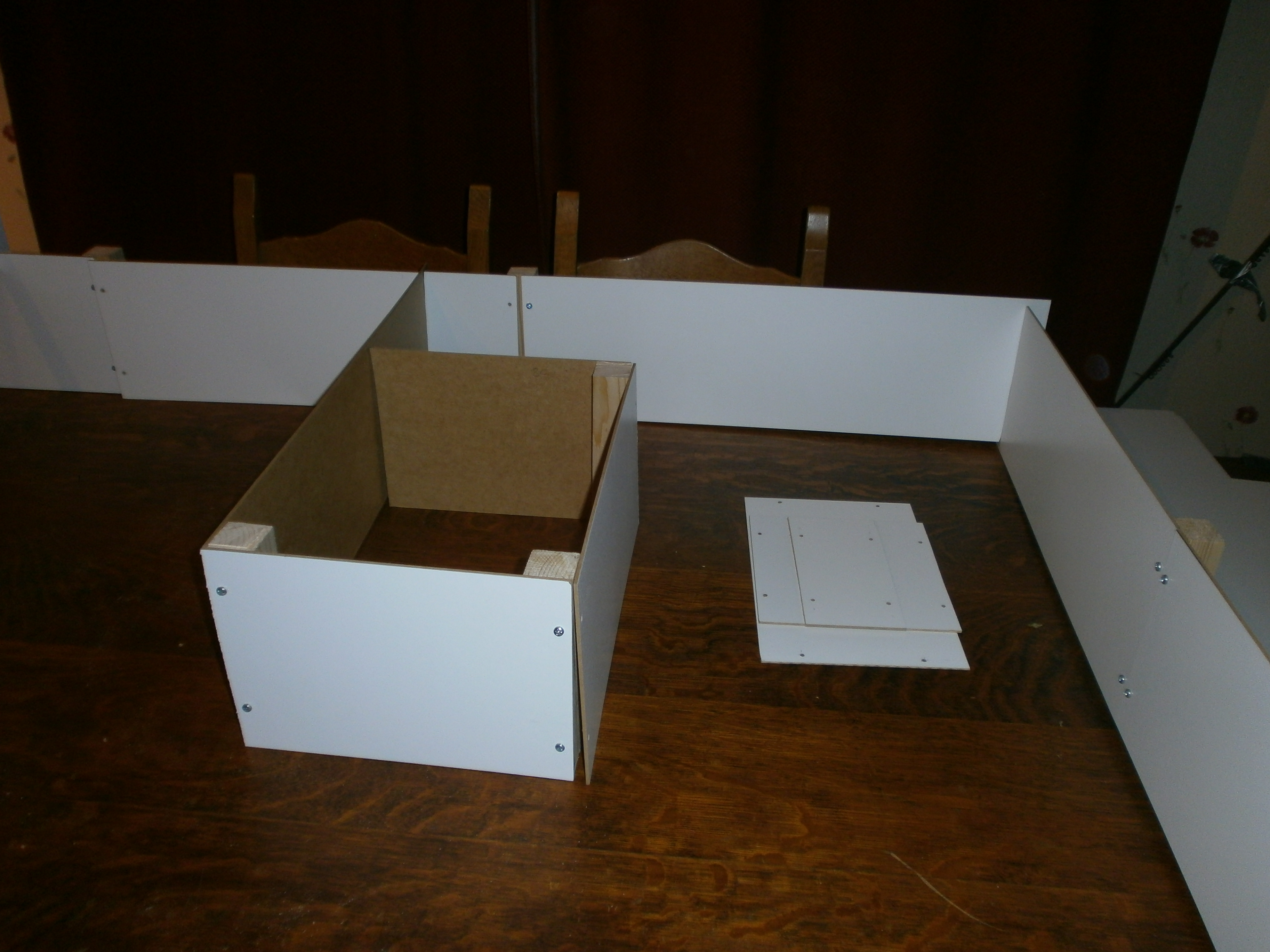
A Maze Robot without a maze would be senseless ! It is why the team build one. It allowed the team to train the robot. The maze is simple, just one way possible for the robot, it is constituted with white boards of 3mm of thickness hold by wood laths which have been screwed on the boards. Some views of the maze are available below:


Some remarks
The boards were bought in Brico, these had been cut and assembled by mean of notches. Moreover, they were chosen white in order to make to measurements more accurate by the distance sensors.
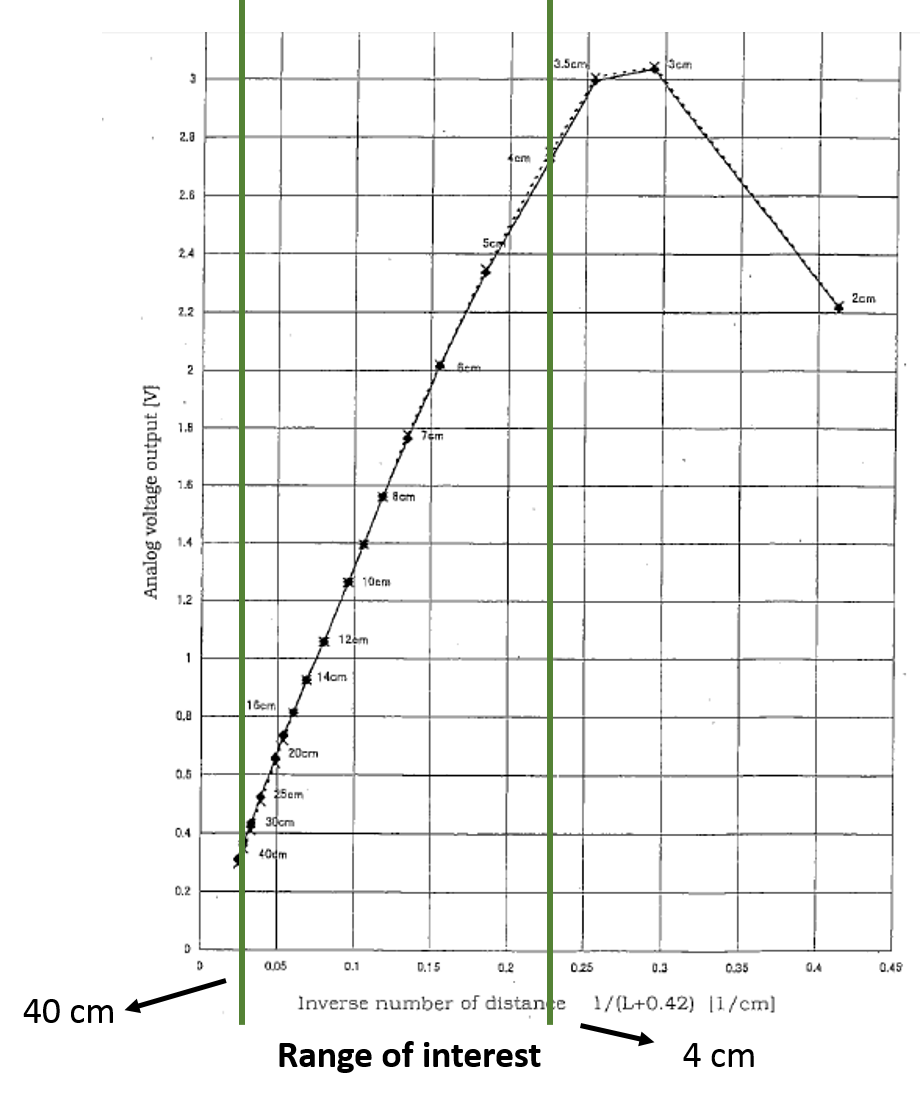
The building was made by taking into account the size of the robot: one considered to work on a specific part of the characteristic of the sensors: a part which optimizes the driving on the middle by the robot (the part can be seen on the figure below). In fact, the characteristics if the InfraRed sensors being non-linear, one preferred work on a linear part and try to keep the robot in that range. The larger of the robot being around 20 cm. One build the maze by taking a distance of 50 cm between the corridors of the maze. This lead us to a distance between the corridors and the robot of 30 cm of each side of the robot.