.jpg)
Mechanics
Motion
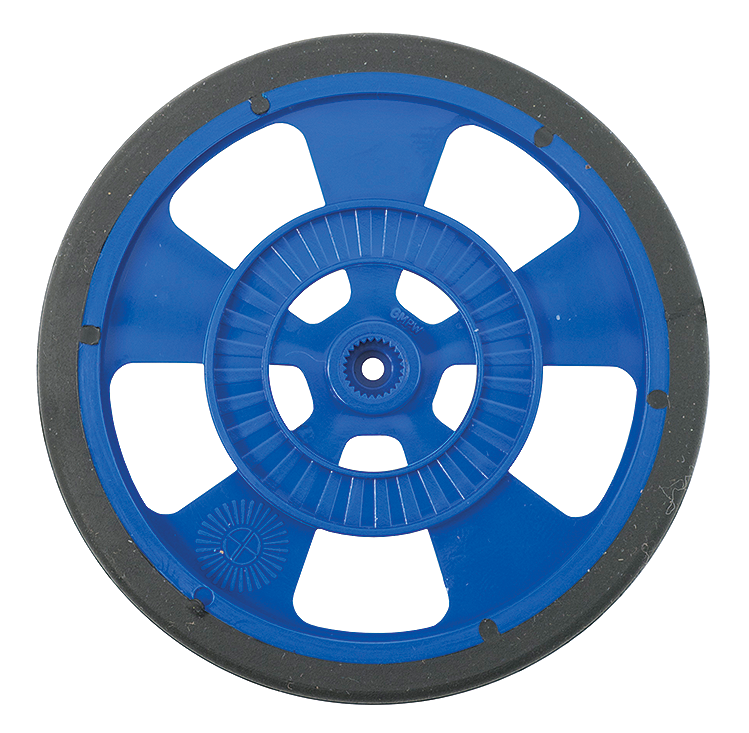
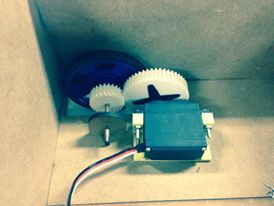
The motion of the robot is governed by two servo motors Futuba S3003 that were hacked in order to obtain a continuous rotation. The rotation induced by the motors was too slow and thus two gears, designed in Solidworks, have been 3D printed. The gears have 25 and 50 teeth in order to double the robot speed. The two wheels have a diameter of 7cm and are compatible with all the current servo motors.
Tutorial: how to hack a servo motor
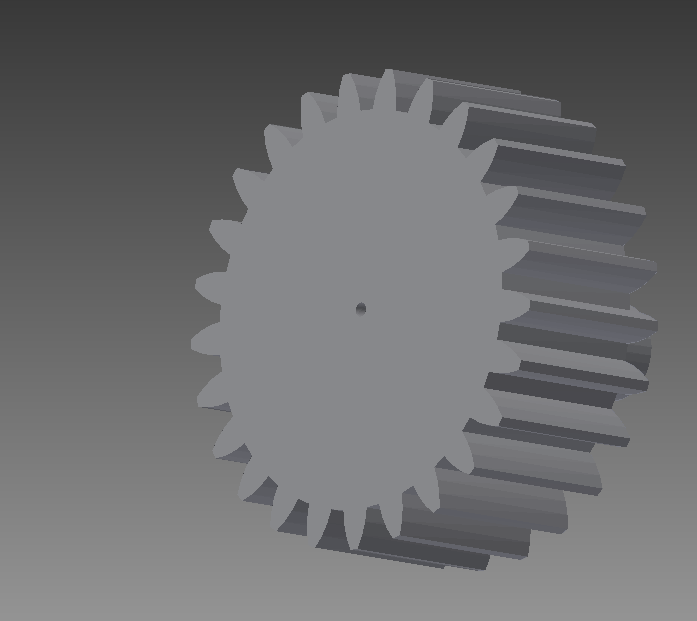
Gears: 3D printing files
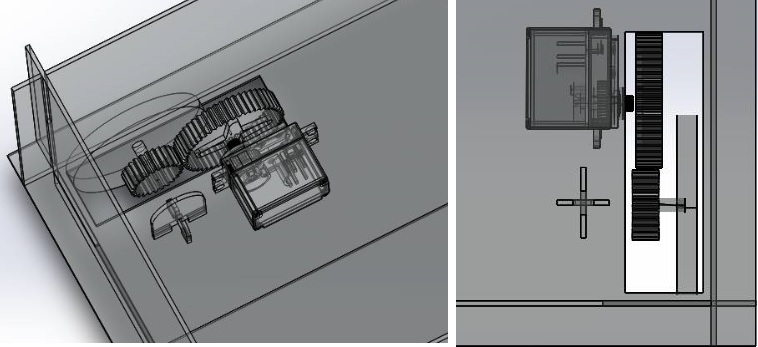
Gear
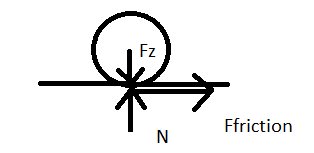
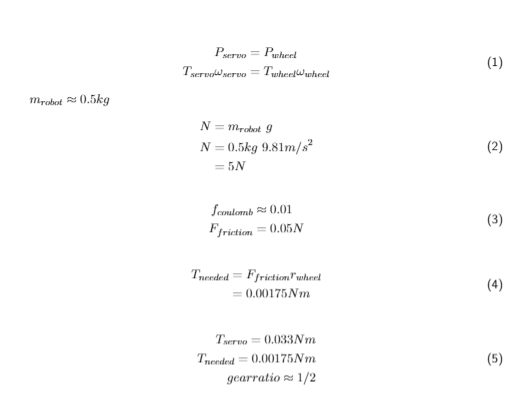
In order to increase the speed of the servomotor, a gear transmission was added. Of course the reduction in torque has to be taken into account to make sure the wheels can still rotate. A back-of-the-envelope-calculation was made to determine the maximum gear ratio.
Back-of-the-envelope-calculations