Home | Logboek: 9 feb | 16 feb | 23 feb | 1 mrt | 8 mrt | 15 mrt
Logboek
Maandag 16 februari 2004

Dagplanning
Voormiddag:
- De controller (afstandsbediening) laten werken zodat het bouwteam
het prototype gemakkelijk kan testen en eventueel aanpassingen
aan de constructie doen.
- De bevestiging van de stift herzien en verbeteren
- Verder de motoren programmeren
 |
| Foto 1: de oorspronkelijke bevestiging van de pen |
Namiddag:
- programmeren: lijnen, rechthoeken en cirkels laten tekenen
- bouwen: problemen die opgemerkt worden door verdere tests oplossen;
bevestiging stift afwerken en de sturing hiervan testen met de
motoren
- Rond 16h aan elkaar de opbouw van het prototype uitleggen zodanig
dat iedereen weet waarvoor een bepaald onderdeel dient; logboek
schrijven
Taakverdeling
Kenny en Thomas: programmeren
Lieselotte, Jan en Claire: bouwen. Lieselotte, Claire
en Jan verschillende systemen voor de bevestiging van de stift
uitwerken en vervolgens de voor-en nadelen onderling bespreken.
Realisaties: bevestiging stift
1) Eerste systeem (zie foto 1)
Problemen: niet stevig genoeg, heel zwaar, het gewicht
is niet goed verdeeld en er is veel speling
2) Tweede systeem: hetzelfde principe als ervoor maar lichter,
steviger, kleiner, stabieler en met veel minder speling.
Probleem: de massa is niet goed verdeeld
3) Derde systeem (zie foto 2): Hier wordt er gewerkt met een soort
hefboom. Er is hier een zeer goede verdeling van de massa en er
is een minieme speling.
Probleem: de (DC-)motor die de pen op en neer moet kunnen
bewegen, draait heel snel. We moeten via tandwielen de rotatiesnelheid
verminderen
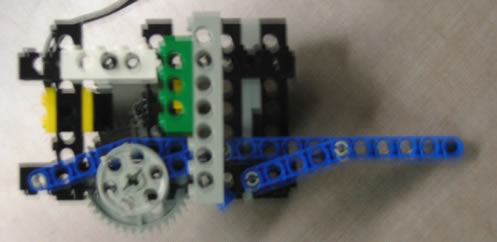 |
| Foto 2: Het hefboomsysteem (sorry voor de wazige foto) |
4) Vierde en huidige oplossing: Hetzelfde principe als het derde systeem maar dan door gebruik te maken van een wormwiel.
Verdere bouwrealisaties
- Door een Legoplaat als ondergrond te gebruiken is de hele constructie
stabieler en steviger geworden.
- Onnodige onderdelen zijn verwijderd (bijvoorbeeld de blauwe
dubbele wand aan de vaste rails, vergelijk tussen foto's 3 en
4)
- Om de werking van de plotter niet te hinderen zijn de aansluitdraadjes
van de motoren verlengd (met wat soldeerwerk). Uit praktische
overwegingen zijn bij elkaar horende draadjes vervolgens samengebonden.
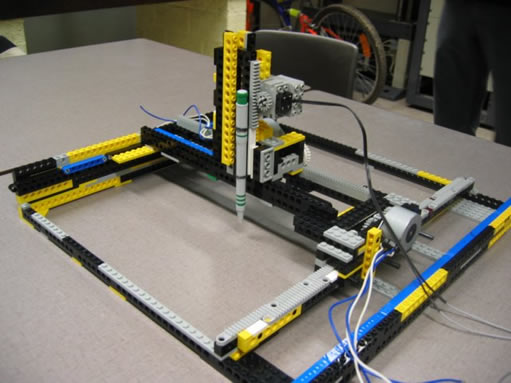 |
| Foto 3: Prototype aan het begin van de dag |
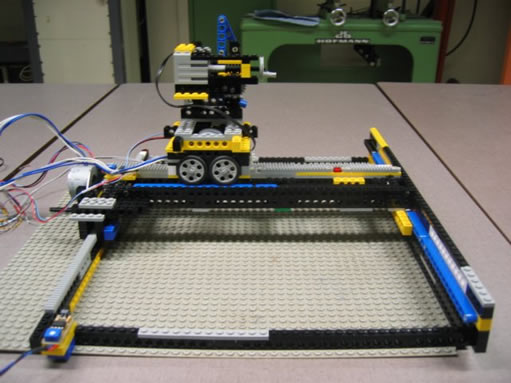 |
| Foto 4: Prototype aan het einde van de dag |
Realisaties bij het programmeren
- Werken met controller: bijna in orde, er zijn nog enkele
problemen met het op en neer bewegen van de pen.
- Er is begonnen met een 'hoofdprogramma' om de plotter te doen
werken. Bij inschakeling vertrekt hij naar de oorsprong (calibratie
via lichtsensoren) Vervolgens kan een set coördinaten ingegeven
worden waarnaar de stift vervolgens beweegt.
- Extra moeilijkheid: de structuur van de taal: er duiken moeilijkheden
op om het programma overzichtelijk en bondig te houden. Daardoor
is een heleboel tijd verloren. We zijn bijgevolg niet geraakt
tot het tekenen van basisfiguren.
Geboekte inzichten
Programma's nemen vrij snel veel geheugen in, vooral de sensoren
en de drukknoppen nemen veel geheugen in.
Mogelijke oplossingen:
- De controller en het "automatische" programma in aparte
programma's steken en dus ook apart inladen in de Powerbrick
- Het aantal knoppen op de controller trachten te verminderen
- Code compacter maken (dit heeft echter reeds tot problemen geleid
met de programmeertaal)
- Het wisselen van de "goede" en de "slechte" rails
heeft een grote optimalisatie teweeg gebracht. De goede rails dienen nu
voor het deel van de constructie dat de grootste last moet dragen.
- Er is een kleine fout bij het werken met tandwielen als de bewegingsrichting
verandert.
- We hebben veel inzicht gekregen met het uitdenken van de stift-constructie,
zoals het zo licht mogelijk proberen maken van een constructie,
dus zo weinig mogelijk stukken gebruiken. We hebben leren werken
met tandwielen en worm gears.
- Het gewicht wordt best zoveel mogelijk boven de rails geplaatst
en niet op de gewone wielen. Zoniet kantelt het wagentje.
To do
- De grootte van een stap van de stappenmotor berekenen, d.w.z.
welke afstand afgelegd wordt bij gebruik van verschillende tandwielen.
- Draden ontwarren en labelen!
- Verder verbeteren van de huidige constructie
- Verbeteren van de rails op de beweegbare as
- Bij het programmeren is het belangrijkste dat nu gerealiseerd moet worden het automatisch tekenen van basisfiguren door de plotter. Dit zal hoogst waarschijnlijk nog enkele gebreken aan de constructie en de programma's aan het licht brengen.