ABOUT the cleaning robot
This amazing robot removes the crumbles of the table and cleans your table with a sponge.
Rambo, the Cleaning Robot
This robot is the product of five brilliant engineering students. It has been built in the framework of the mechatronics course for the first master year students. The goal of this course is to learn how to realize a robot from the conceptual design to the real world.
We chose to build a cleaning robot for different reasons. First, this project uses a lot of robotics concepts. The first one is the displacement on the table. Indeed, we need wheels to move. This requires motors and a perfect regulation so that the robot can move straight forward. Then, the robot is able to multitask, drive and detect borders, clean the table and assemble the crumbs. We have to find a perfect structure to assemble the whole robot and to fit everything perfectly. The last very interesting part is the edge detection thanks to IR sensors.
In this website, we wanted to highlight the different parts we had to focus on and the problems we encountered.
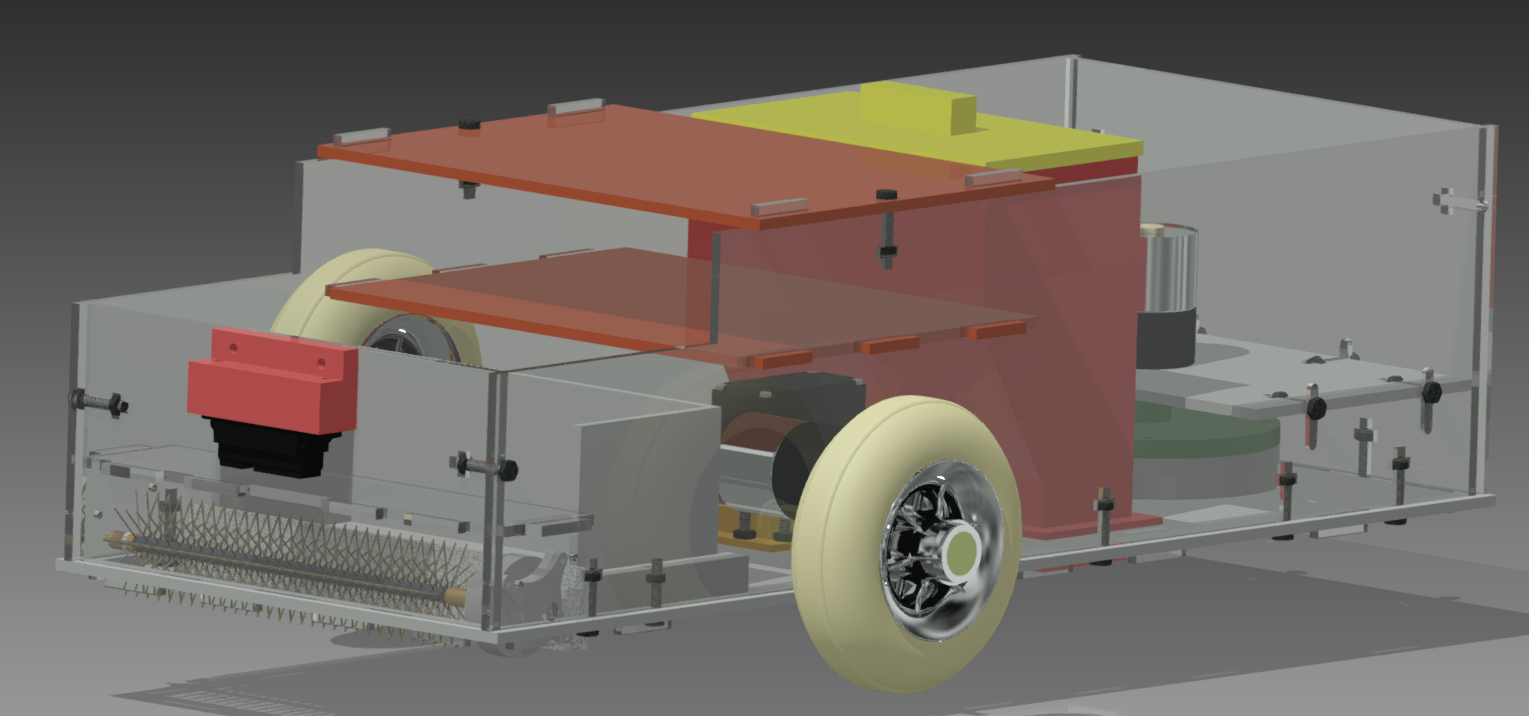
Computer Aided Design Software
To build this project, we had to be able to design our robot on the computer. The aim of that is to know the exact dimensions of our pieces and notice before starting the construction that things would go wrong. The program we used was INVENTOR.
FabLab
When the design on computer was done, we had to build the robot. Few years ago, the robots could be made thanks to different techniques : turning, milling, drilling. Today, the technology evolved and we used for this project laser cutting to cut our plates of plexi and 3D printing for complex pieces. The machinery was available for us at the FabLab
Eagle
The PCB is an important part of the project. It enables to connect the microcontroller with ll the different parts of the project. The creation of it requires to be precise on the band width and the place of everything. To do it, we used a program, which gather a lot of electrical components to build those boards, called Eagle