Brush the Crumbles!
Rambo Robot eats everything's on its way.

Motor
The constrain for this part was that the motor had to be as small as possible. Therefore a brushless DC motor is used to make the brush rotate. However,in order to control a brushless motor, one needs more than a PWM. It needs a small control unit to proceed to the commutation.

ESC Controller
The ESC controller of the brushless motor
What function does it fulfill ?
Rambo Robot takes off the crumbles of the table because Rambo Robot loves the crumbles.
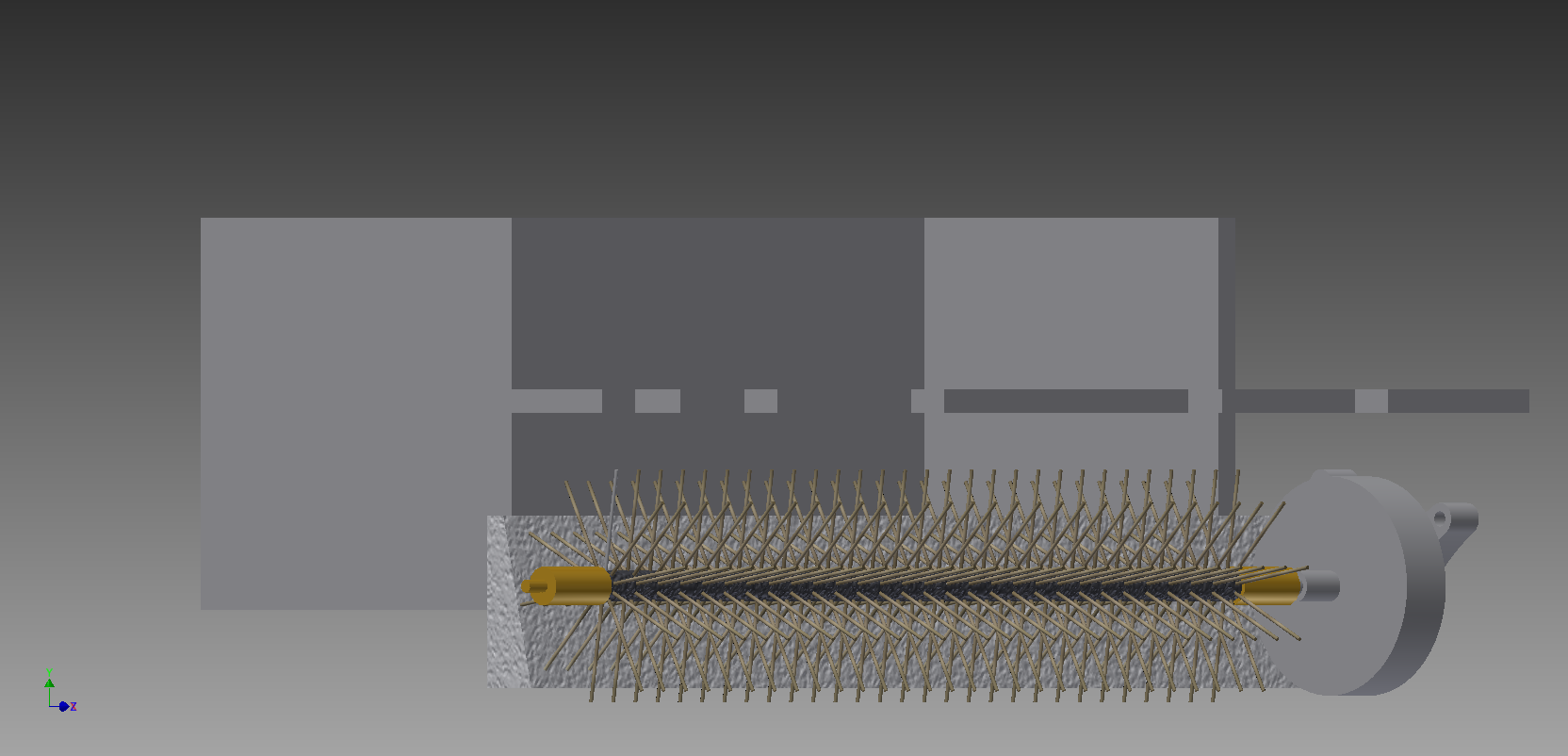
How does it work?
As shown on the figure above, at the front of the robot, a thin brushless DC motor is fixed to the left side wall. A shaft connector is fixed to the motor shaft. A brush has its shaft insert into the connector and into a hole on the other side wall. The height of the system relatively to the ground table is measured for the brush's hairs to have enough pressure on the ground to take of the crumbles but not too much so that the brush doesn't break too fast. Where do the crumbles go then ? The stomach of the Rambo Robot (which is designed to be taken off and emptied very easily) is just behind the brush. It consists of a plexiglass dirtbag.
The Brushless motor is driven by controller because the commutation is not automatic for these kind of DC motor.
The controller must be power supplied by an external battery. The controller is connected with the arduino by 3 wires:Computer Aided Design Software
To build this project, we had to be able to design our robot on the computer. The aim of that is to know the exact dimensions of our pieces and notice before starting the construction that things would go wrong. The program we used was INVENTOR.
FabLab
When the design on computer was done, we had to build the robot. Few years ago, the robots could be made thanks to different techniques : turning, milling, drilling. Today, the technology evolved and we used for this project laser cutting to cut our plates of plexi and 3D printing for complex pieces. The machinery was available for us at the FabLab
Eagle
The PCB is an important part of the project. It enables to connect the microcontroller with ll the different parts of the project. The creation of it requires to be precise on the band width and the place of everything. To do it, we used a program, which gather a lot of electrical components to build those boards, called Eagle