Displacement of the robot
Two wheels, a back support to move the robot on the table..
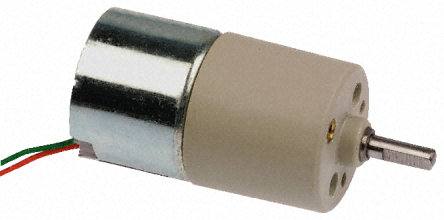
Motor
In order to make turn the wheels, a basic 2 pins - DC motor is used. For wheels, we need motor with a slow rotation speed and a high torque. With its 12 volts supply, this motor has a torque 2.5Ncm and a rotation speed of 80RPM.

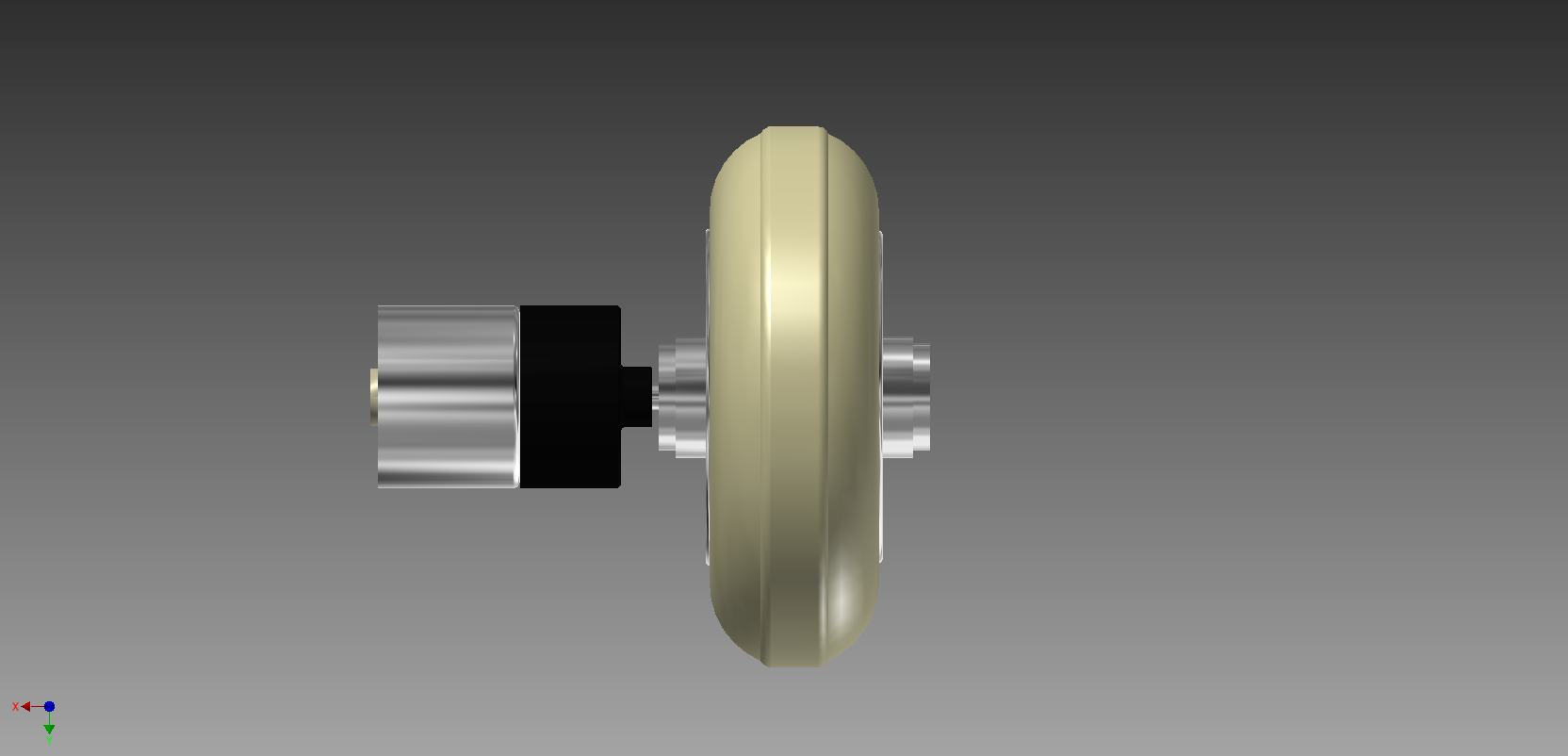
Wheel
The most important think with a robot working on wet surfaces is to be sure the wheels won't slip. The chosen wheels have a strong steel strucuture to support the weight of the robot and a rubber band outside to avoid slipping.
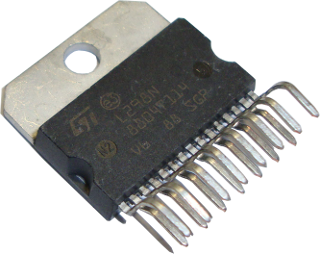
DC-Controller
The L298n controller used for the motors, this one is shown in the figure above.
What function does it fulfill ?
For the displacement of the robot, we choose two wheels and the sponge as support. The reason is simple. Thanks to this configuration, the robot is able to turn on itself. Moreover, there are no losses due to gears like on tanks. The only problem is that with two motors, if we want the robot to go straight forward, the controller has to regulate the system.
How do we regulate the system ?
The Regulation of the displacement of the robot can be very complex and we choose to simplify it as much as possible. The first thing was to add some rotary controllers to know the angular position of the wheels. Then we had a choice to make: position regulation or velocity regulation. Given that we want to clean the table randomly we don't need to know exactly where the robot is. That's why we choose a simple velocity regulation.
DC-controller
The motor is driven by controller because the commutation is not automatic for these kind of DC motor.
The motor is connected with 3 wires to the controller:Computer Aided Design Software
To build this project, we had to be able to design our robot on the computer. The aim of that is to know the exact dimensions of our pieces and notice before starting the construction that things would go wrong. The program we used was INVENTOR.
FabLab
When the design on computer was done, we had to build the robot. Few years ago, the robots could be made thanks to different techniques : turning, milling, drilling. Today, the technology evolved and we used for this project laser cutting to cut our plates of plexi and 3D printing for complex pieces. The machinery was available for us at the FabLab
Eagle
The PCB is an important part of the project. It enables to connect the microcontroller with ll the different parts of the project. The creation of it requires to be precise on the band width and the place of everything. To do it, we used a program, which gather a lot of electrical components to build those boards, called Eagle