Sensors
Two types of sensors, one for detecting the table edge and another one to regulate the wheels
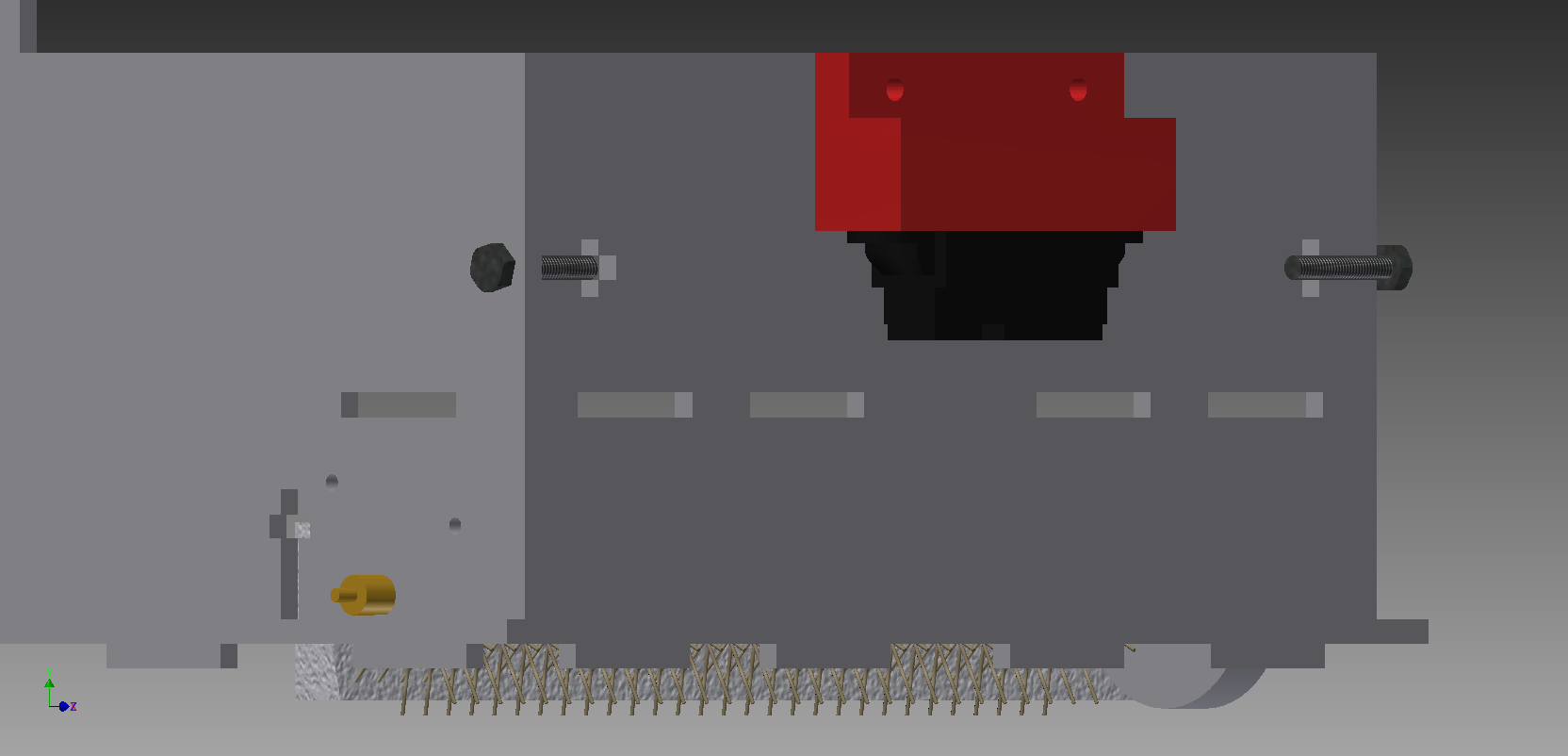
Table Edge Detection
In this project, the robot will run at about one meter above the floor. It can absolutely not fall on the ground. To do that, the robot is supplied by distance sensors. When the robot is on the table, the sensors send a voltage above 1.5 volts which means that the sensor is at a distance of about five centimeters. Then, if the sensor output sends a value below 1.5 volts, it means that the front of the robot is no longer over the table. At this time, the robot immediately stops, goes back and turns a random value between 125 and 225 degrees.
Wheel Regulation
The robot moves on the table. For this, it has two wheels and a stick behind for equilibrium. At the back of the robot, a sponge is rotating. This engenders a torque and the robot risks to be deviated from its run. Rotary encoders allows the system to know if a wheel is in advance compared to the other. Thanks to that, the arduino will be able to regulate the run and the robot will move straight forward.
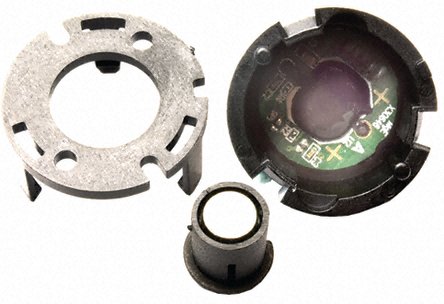
Rotary Encoders
Rotary encoders are used to monitor the angle position of a shaft. In this project the goal of knowing shaft position is for regulation. Those encoders have a 10 bit output which means that precise for about a quarter degree. This accurancy is maybe a bit excessive. It will influence the choice of the gain for the regulation.

IR Distance Sensor
The output of a distance sensor is very different between short distance (5cm) and long distance (more than 60 cm). Given that the color of the table is unknown, the only solution is using distance sensors. We choose a cheap distance sensor because the accurancy is not important. Actually we use it as a binary element.
Computer Aided Design Software
To build this project, we had to be able to design our robot on the computer. The aim of that is to know the exact dimensions of our pieces and notice before starting the construction that things would go wrong. The program we used was INVENTOR.
FabLab
When the design on computer was done, we had to build the robot. Few years ago, the robots could be made thanks to different techniques : turning, milling, drilling. Today, the technology evolved and we used for this project laser cutting to cut our plates of plexi and 3D printing for complex pieces. The machinery was available for us at the FabLab
Eagle
The PCB is an important part of the project. It enables to connect the microcontroller with ll the different parts of the project. The creation of it requires to be precise on the band width and the place of everything. To do it, we used a program, which gather a lot of electrical components to build those boards, called Eagle