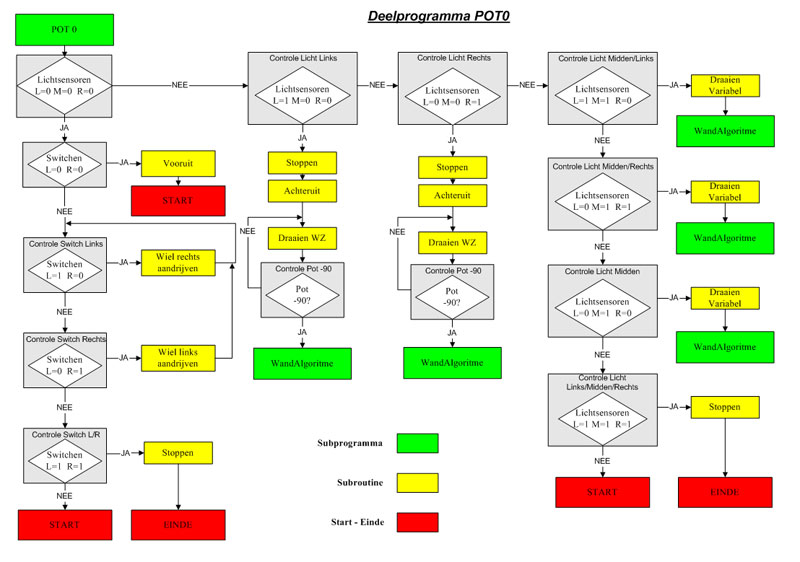
Geval Pot 0
Dit subprogramma is het grootste onderdeel van ons programma. Het bepaalt de acties van Vertigo aan de hand van de signalen van de sensoren. Wanneer door de lichtsensoren een object wordt gedetecteerd, zal Vertigo, afhankelijk van welke en hoeveel lichtsensoren worden aangesproken, een bocht van 90 graden maken om het object te ontwijken. Vertigo zal een korte afstand afleggen en zichzelf nadien weer recht op de wand oriënteren om zo zijn weg naar de top te vervolgen. Gezien de wedstrijd van Clawar ook belang hecht aan de tijd waarin het robotje de bovenkant van de wand bereikt, hebben we getracht om voor elke situatie de snelste manier van reageren te bepalen. Dit maakt dat het algoritme veel verschillende gevallen bevat, en aldus ook veel verschillende reacties. De basis blijft echter steeds dezelfde: wanneer een lichtsensor iets detecteert, wordt er gedraaid en nadien teruggedraaid, de richting en de hoek zijn afhankelijk van de oorspronkelijke oriëntatie van Vertigo op de wand.
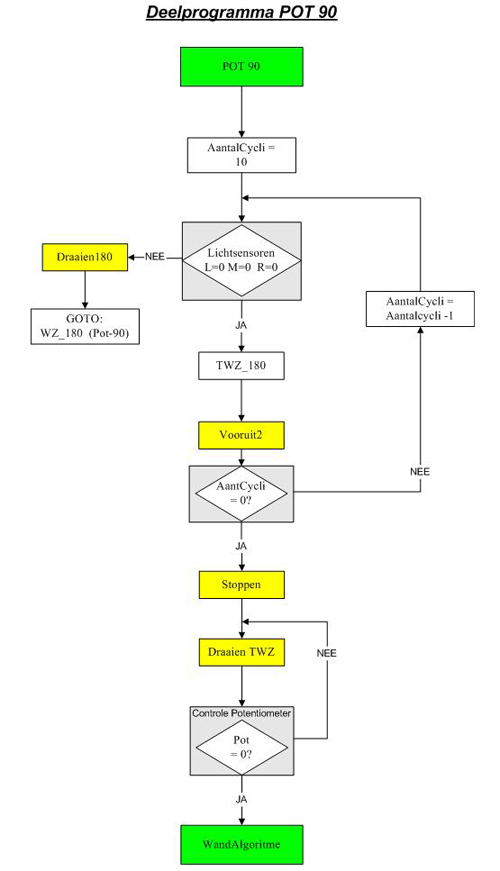
Geval Pot 90
Dit subprogramma beschrijft de handelingen van Vertigo naargelang zijn ingangssignalen wanneer hij horizontaal op de wand staat georiënteerd, maw. wanneer zijn voorkant naar een zijwand is gericht. In geval Pot90 is de voorkant van Vertigo naar de rechterzijwand gericht. Vertigo zal dan een kleine afstand voorwaarts afleggen en zichzelf weer rechtzetten op de wand. Indien hij binnen dit kleine voorwaartse interval een zijwand detecteert, zal hij 180° draaien, opnieuw een klein voorwaartse beweging maken en zichzelf weer rechtzetten.
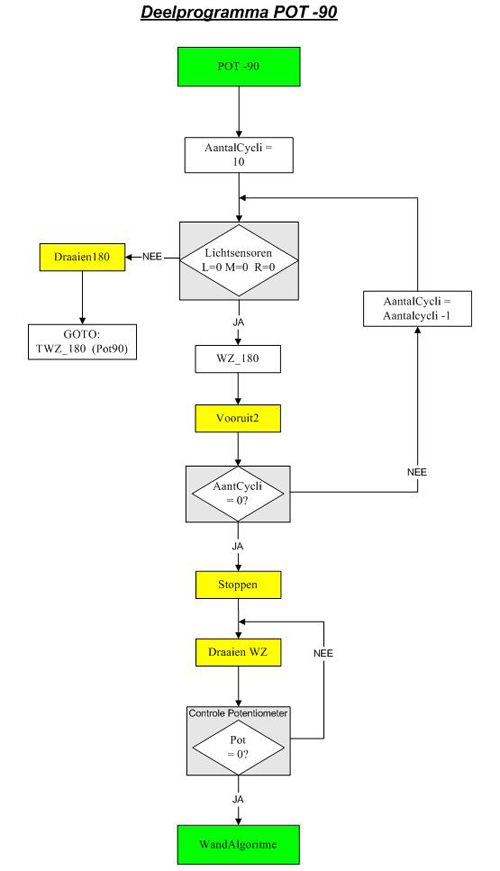
Geval Pot -90
Het subprogramma Pot -90 is zeer gelijkaardig aan Pot 90. De verschillen zitten hem enkel in de draairichting.