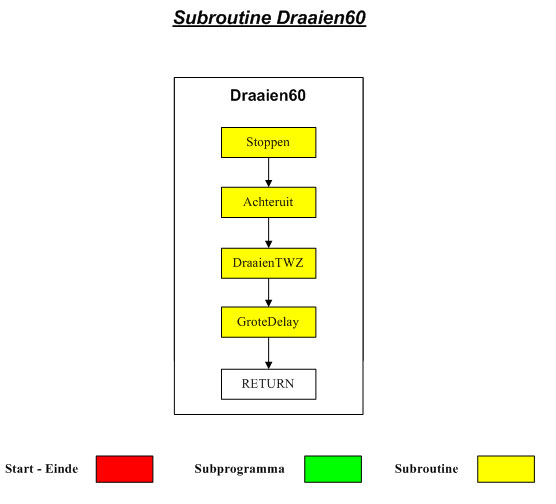
Draaien60
Deze procedure wordt opgeroepen in het grondalgoritme. Wanneer de robot een object (witte wand) detecteert zal hij zich er lichtjes van verwijderen, een bocht nemen van ongeveer 60 graden en zijn weg vervolgen.
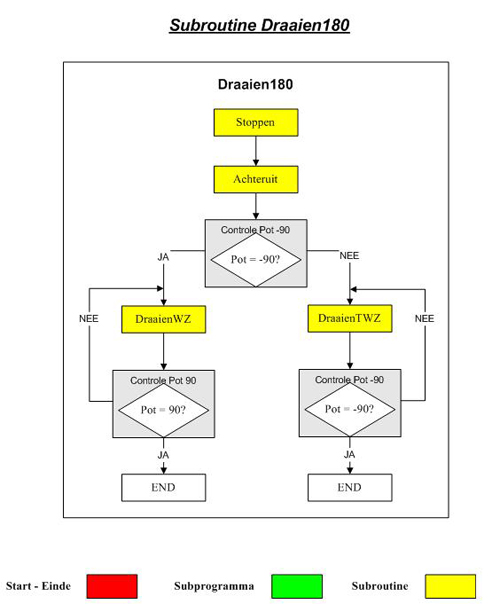
Draaien180
Deze procedure wordt opgeroepen wanneer de robot in zijwaartste stand staat en de drie lichtsensoren tegelijk worden aangesproken. In dat geval ziet hij een wand en zal hij zich 180° draaien. Afhankelijk van welke oriëntatie Vertigo precies heeft, zal dit draaien in wijzerzin of in tegenwijzerzin gebeuren.
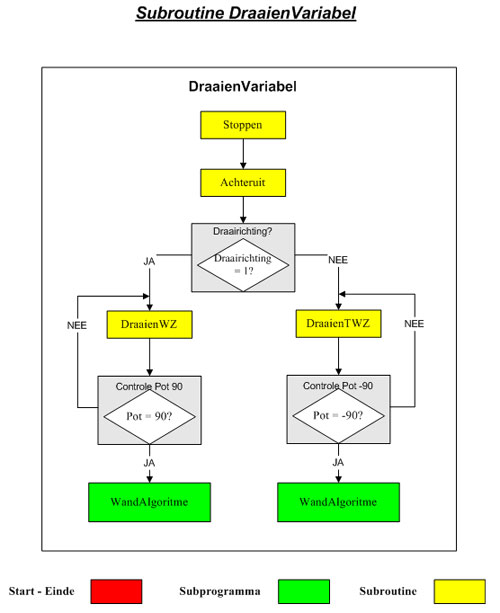
DraaienVariabel
Om ervoor te zorgen dat Vertigo niet steeds dezelfde kant opdraait, hebben we verschillende gevallen gedefinieerd. Zo zal hij in TWZ draaien wanneer enkel de rechtse lichtsensor vooraan een object detecteert. Wanneer enkel de linkse sensor iets detecteert, zal hij in WZ draaien. Dit zijn allemaal maatregelen genomen om ervoor te zrgen dat Vertigo zo snel en zo efficiënt mogelijk de top bereikt. Om aan deze eis tegemoet te komen, werd ook DraaienVariabel geschreven. Deze procedure zorgt ervoor dat Vertigo onthoudt in welke richting hij laatst heeft gedraaid, en zal vervolgens de andere richting kiezen om te draaien.