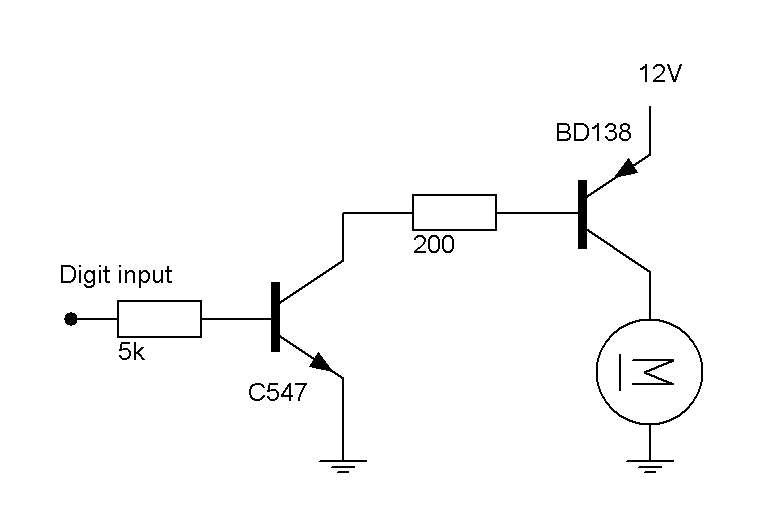
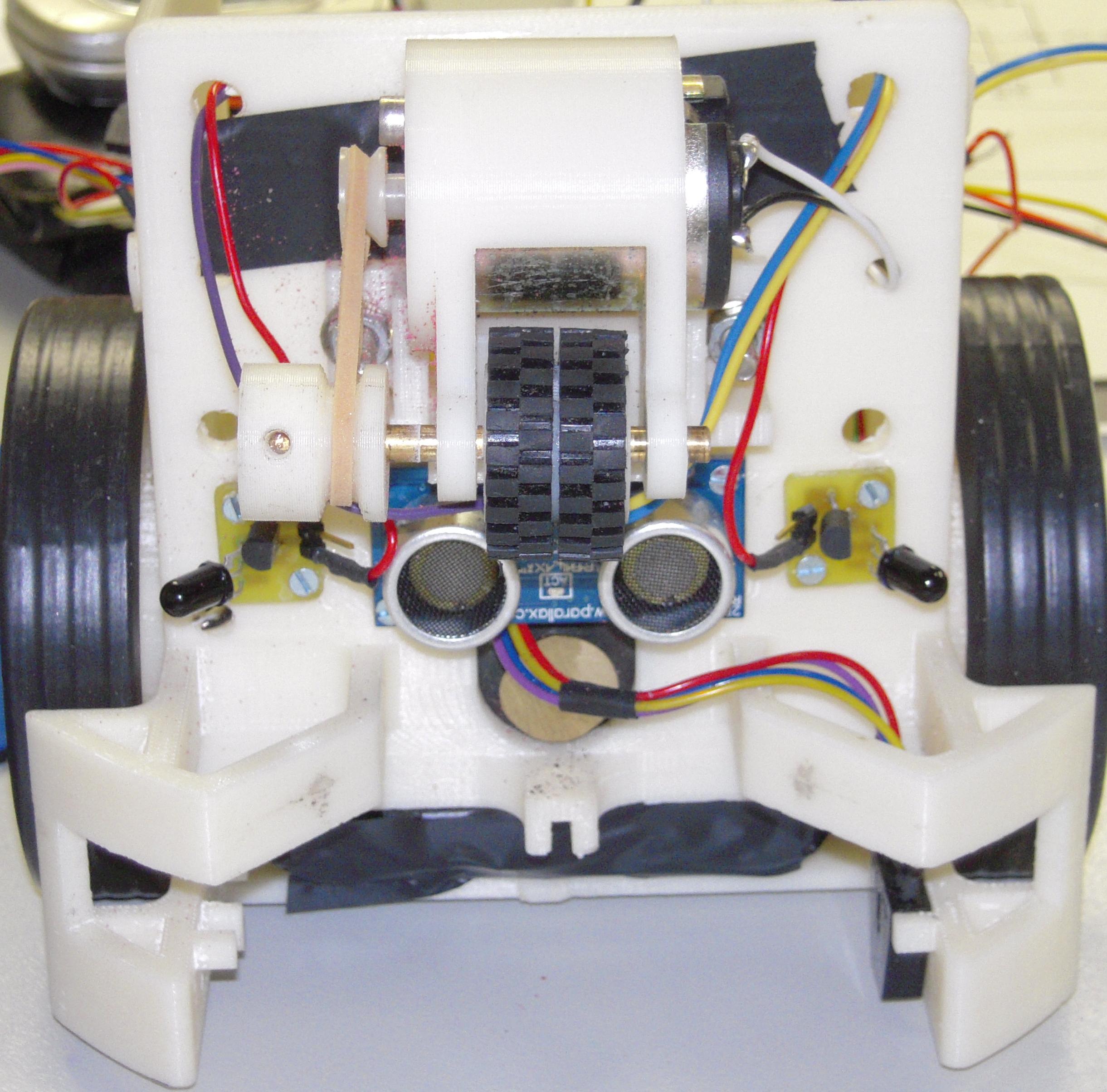
The dribbler is a soft rubber turning wheel, in contact with the ball. It exercises a force through friction to pull the ball towards the robot. If the friction between ball an dribbler is higher than that between ball and soil, the ball spins towards the robot, giving the same result. The dribbler wheel is placed on a bridge which can rotate, so the wheel can move upwards, to keep contact with the ball. An optimal combination of the mass and a soft spring gives a stable operation. Without the spring, for example, the wheel starts bouncing when in contact with the ball, risking to lose the ball. The low speed 12V dc motor and pulley transmission provide a low contact speed, to not ricochet the ball away at first contact. The dribbler is only activated by the PIC when necessary in order to save energy.
Copyright © 2009 • Ward De Paepe • All Rights Reserved |