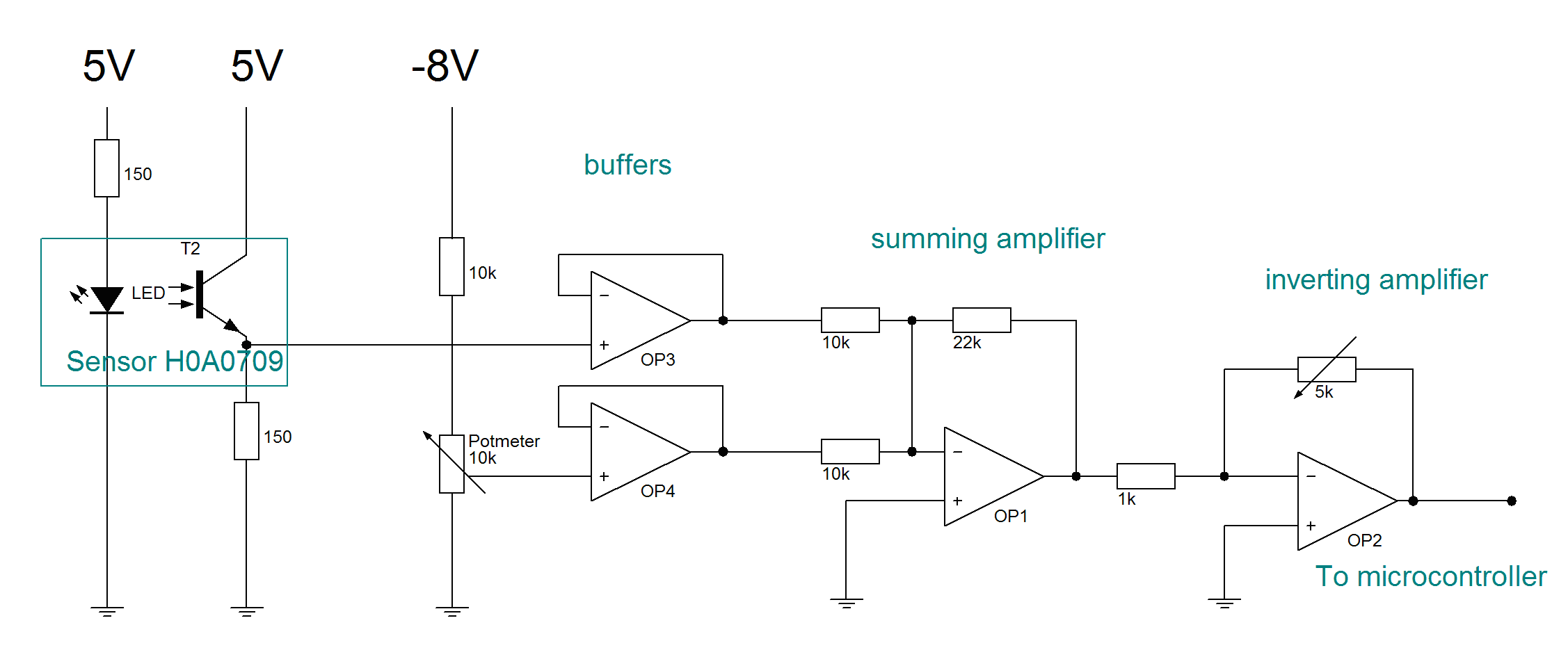
IR-Reflective sensors
The IR-reflective sensors gave an approximate voltage value of 0,41V for black and 2,10V for white. The AD converter of the microcontroller works between 0 and 5V. To get more accuracy, the offset on this signal needed to be subtract and the final result should be amplified to get exactly 0V for black and 5V for white. (doing this in the opposite order was not possible, because we needed to amplify the signal above saturation of the OPAMP’s).
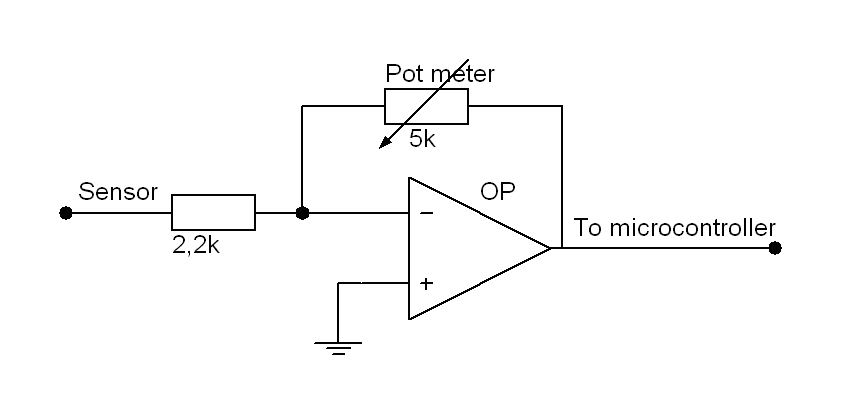
SHARP GP2Y0A0YK
The Sharp sensor gave a maximum at 20 cm of 2,75V. Again, to get more accuracy, we amplified the signal to get a maximal value of 5V.
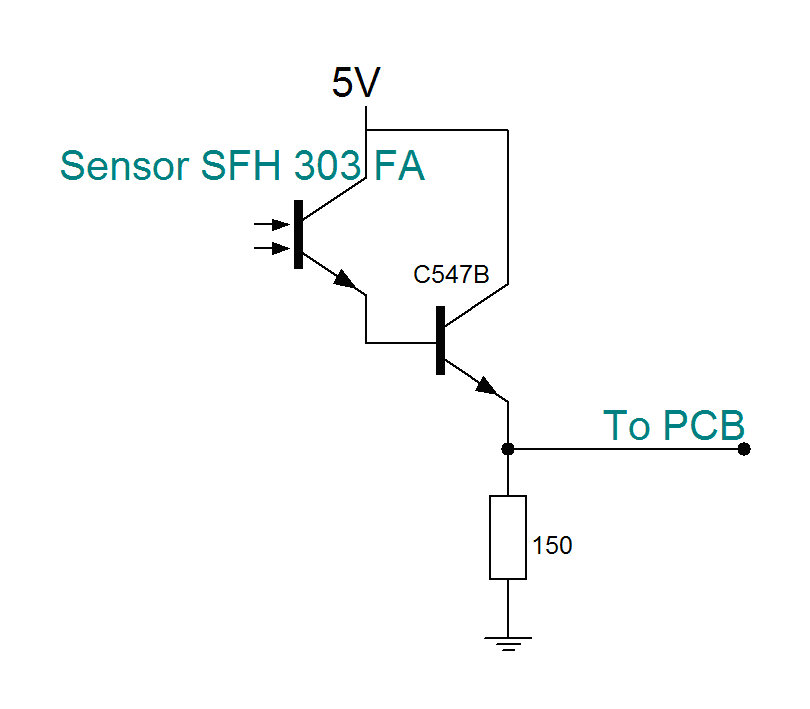
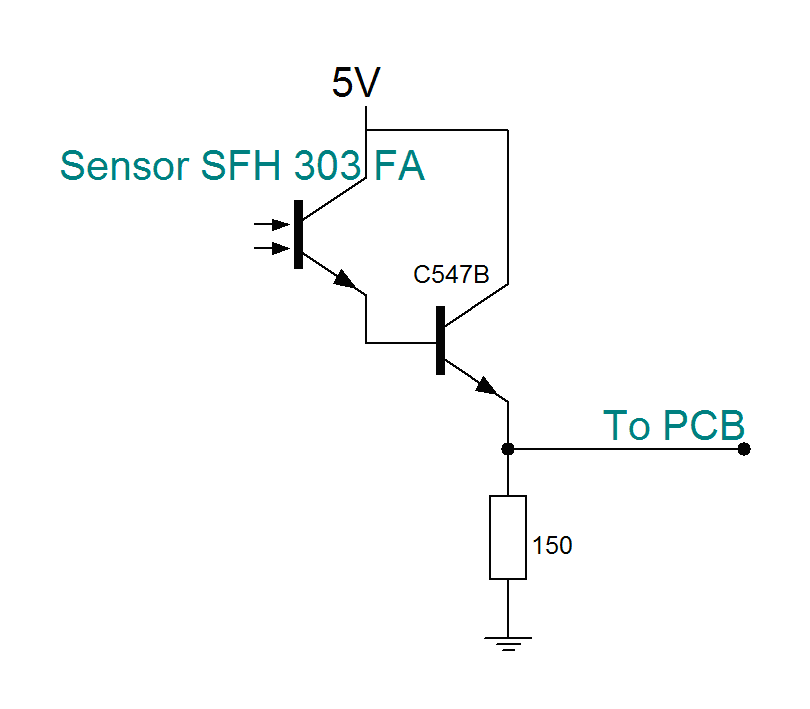
SFH 303, Silicon NPN Phototransistor with Daylight filter
The SFH 303 is a NPN Phototransistor. The output of this sensor was maximal 15µA. To avoid problems with noise, we first amplified this current by placing the phototransistor in Darlington arrangement with a C547B transistor.
{kind=link}
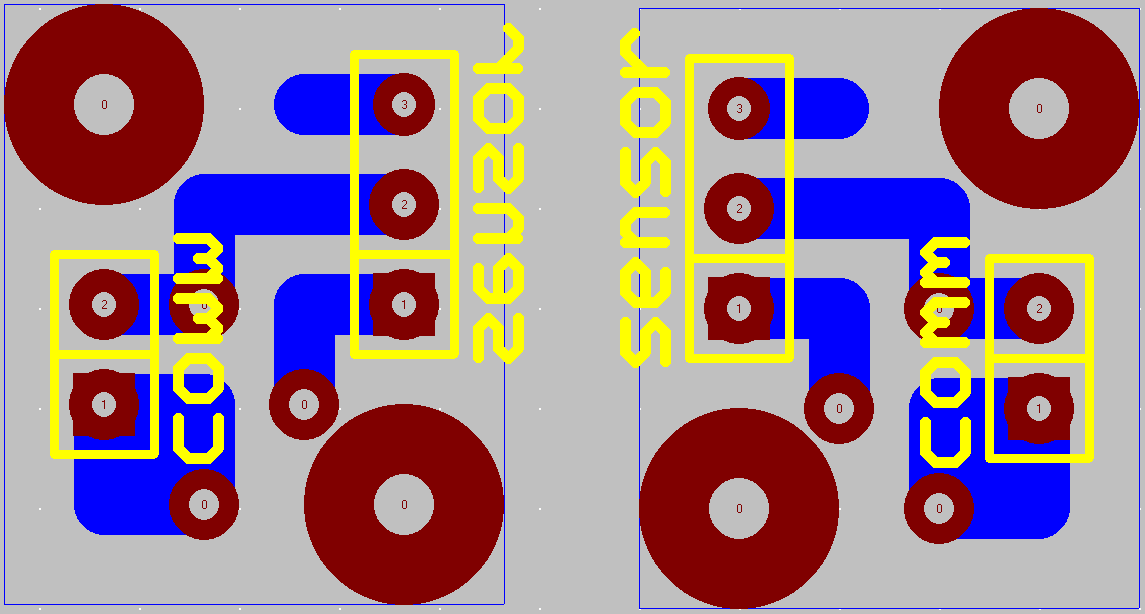
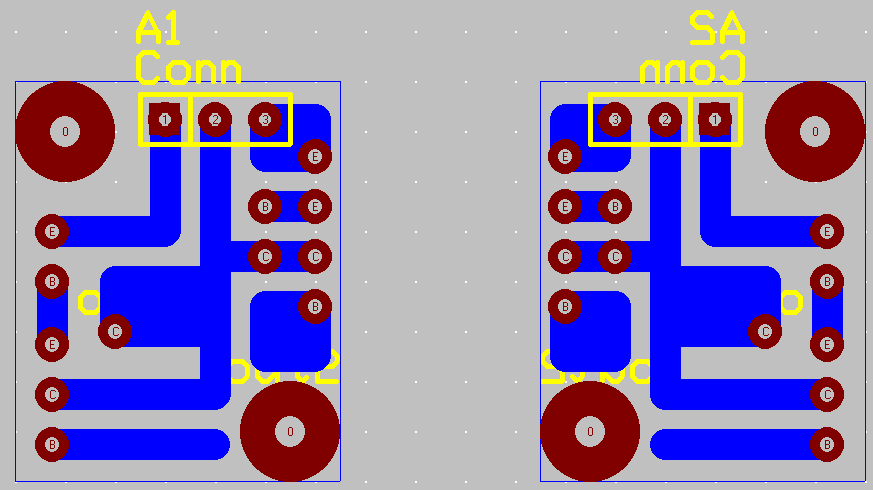
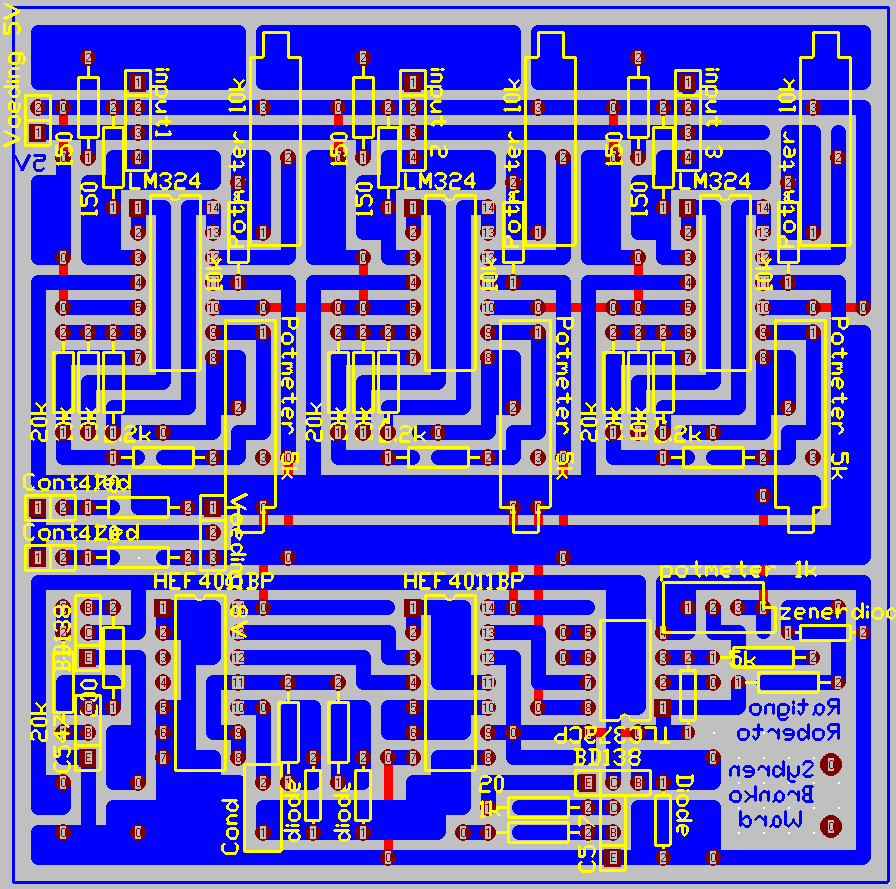
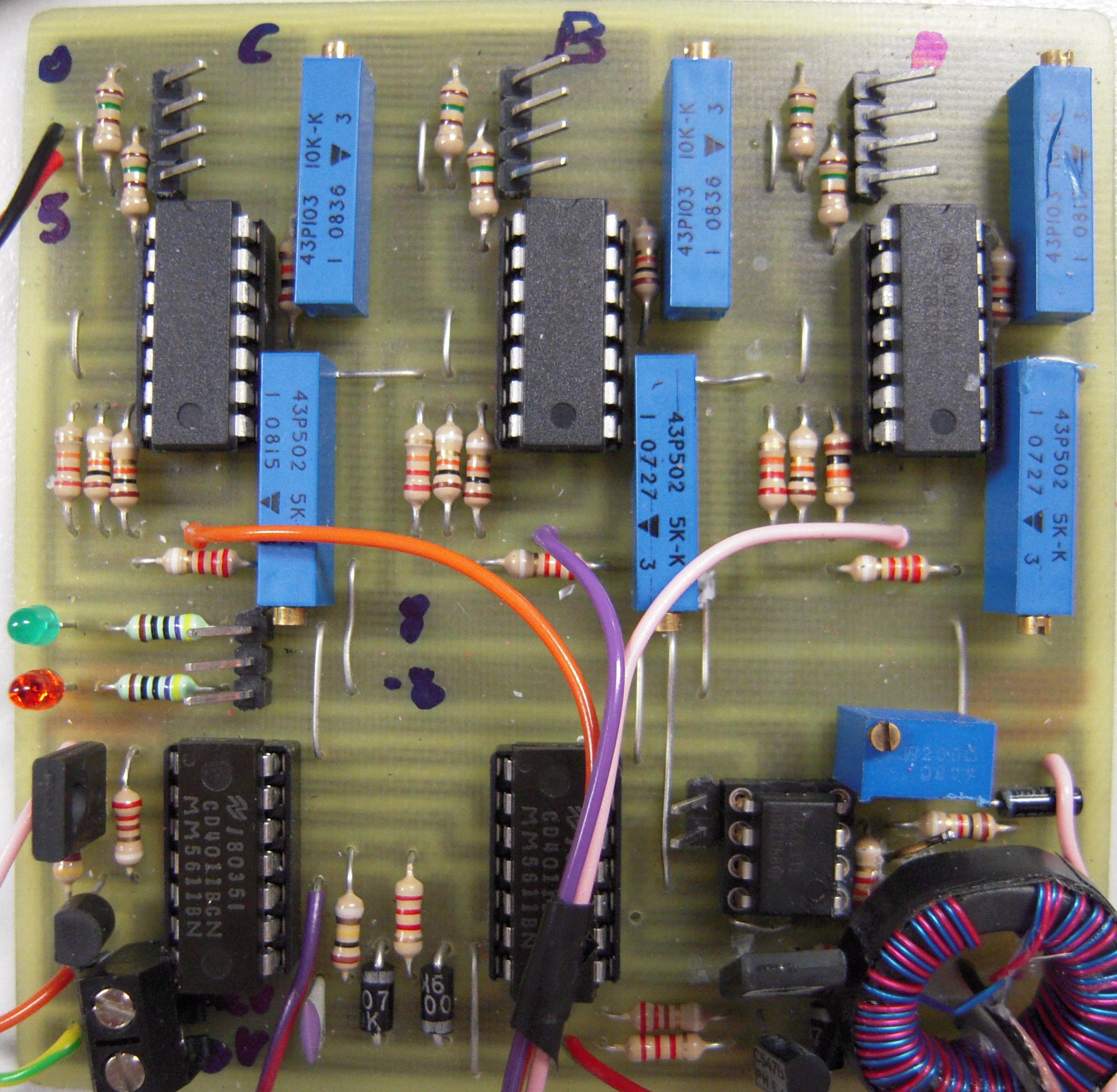
Afterwards, the signal of the sensors is sent to a PCB, where there are some comparisons. The underlying theory will be explained in the program we wrote.
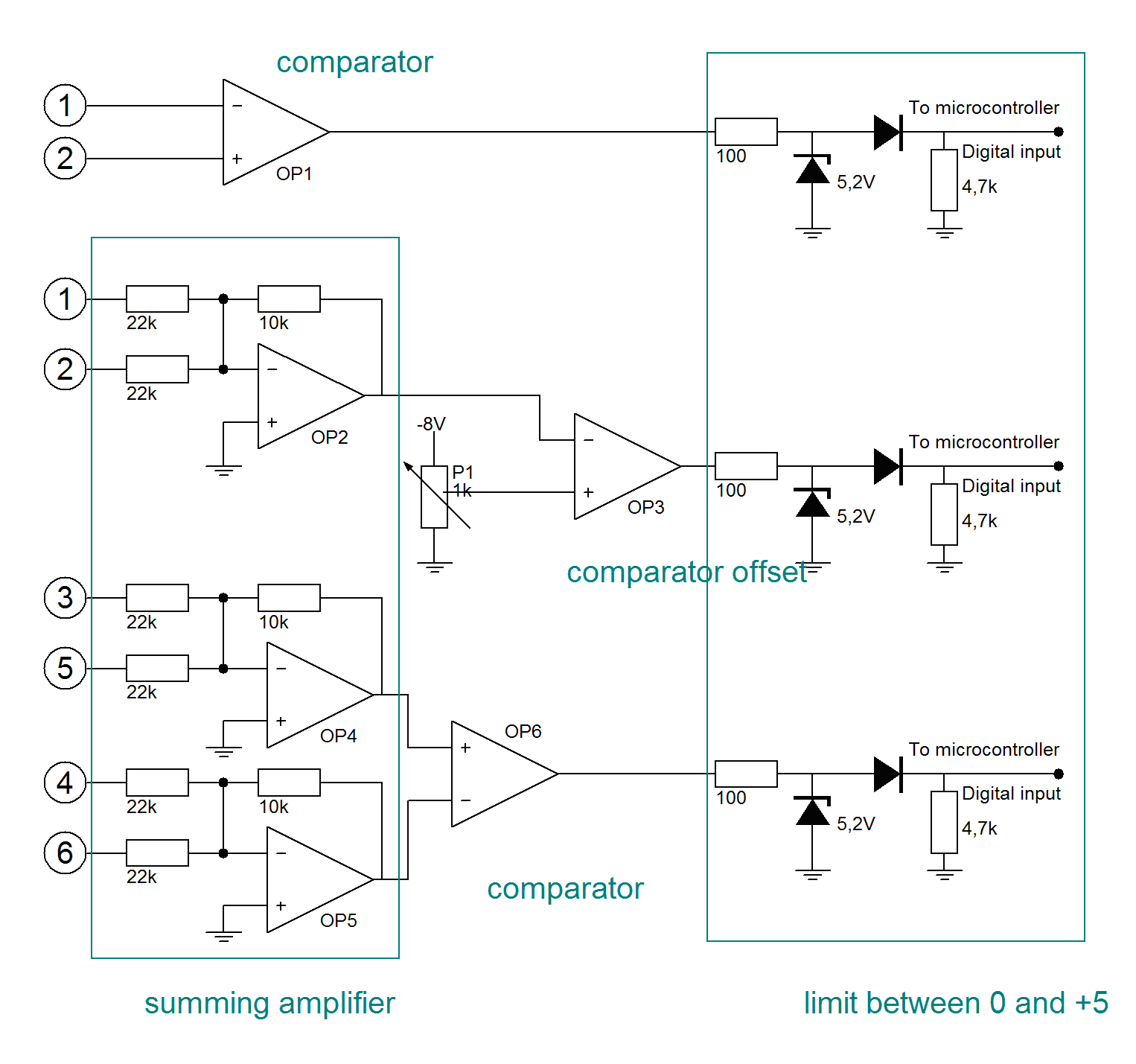
The first circuits makes a comparison of left and right of the front sensors. (IR1). The second circuit is the summing of the pairs of rear sensors. Afterwards, there is the comparison of left and right. (IR2). The thirth circuit is the summing of the front sensor for detection if the ball is seen by the front sensors. (IR3)
The output of the LM324 is 8V or -8V, depending on the inputs. These voltages need to be limited between 0 and +5V for input in the PIC. This is realised with a Zenerdiod.
Operational Amplifiers (OPAMP’s)
As OPAMP’s, we use the LM324 (quad OPAMP’s). The OPAMP’s need a power supply from ![]() , and
, and ![]() . First we needed to create -12V from the 12V battery voltage.
. First we needed to create -12V from the 12V battery voltage.
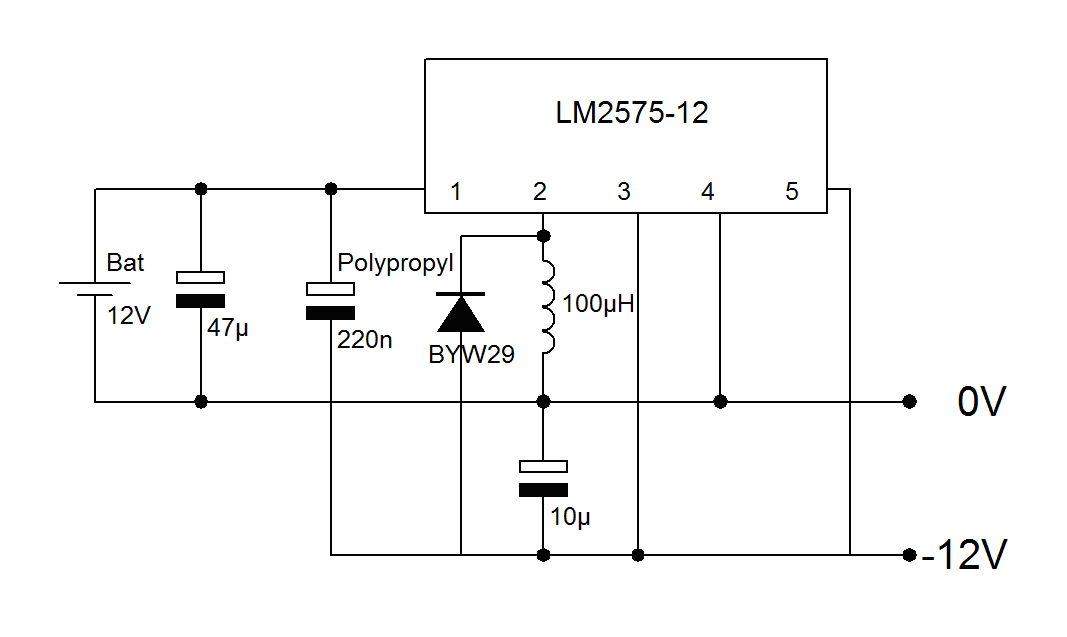
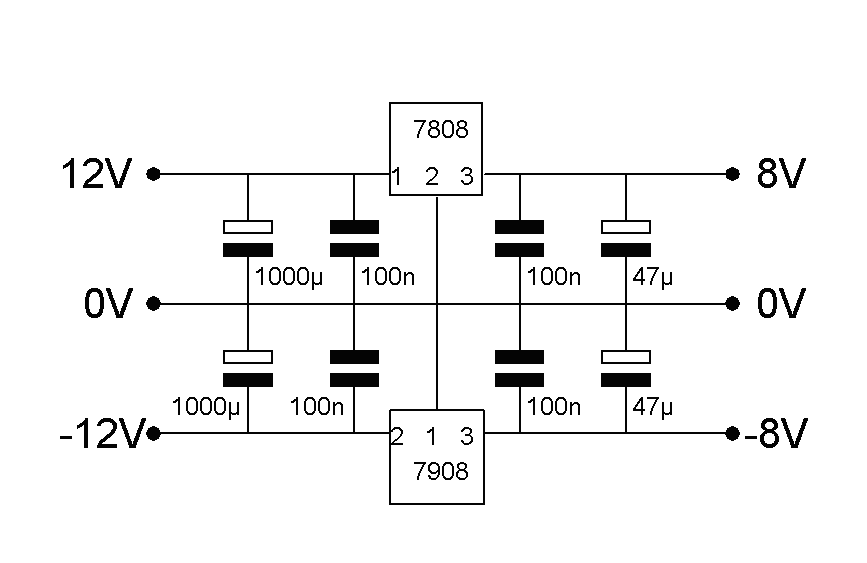
The Polypropyl capacitor is a crucial part, because this capacitor protects the internal transistor of the LM2575-12. The 12V and -12V are regulated to 8V and -8V.

To download the PCB desings, click here
Copyright © 2009 • Ward De Paepe • All Rights Reserved |