The base of the robot is self-made using the technical drawings you can find below. We used a composite material that consists of carbon fibers, woven in two perpendicular directions. This material is very light, but still very strong and rigid. When you can't find this kind of material, you can always use wood or steel. Wood is still pretty light, but your plate will have to be a lot thicker to withstand all the force. Steel is stronger, but also heavier. Besides that, steel might also make working with your magnets just a little harder. Weight was a very important parameter in any decisions we made concerning the design of Vertigo. The robot has to be carried by a few little magnets, so overdimensioning it is not the way to go.
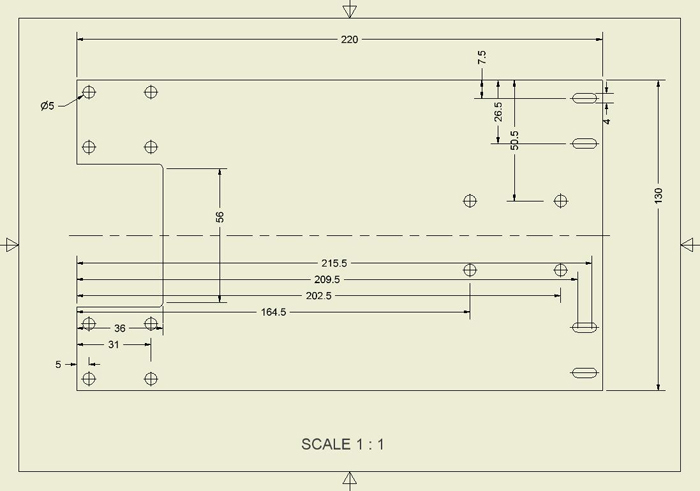
The first drawing shows the design of the base of the horizontal part, complete with measurements. If you use a carbon fiber plate, make sure to use the right tools when manufacturing this plate. It needs to be cut with a water cooled diamante saw. When drilling holes in it, put a wooden platen under the carbon fiber plate to make sure that the fibers don't get pressed out of the matrix. Use only sharp and well maintained tools; carbon fiber is a very strong and rigid material, but is very fragile while manufacturing.
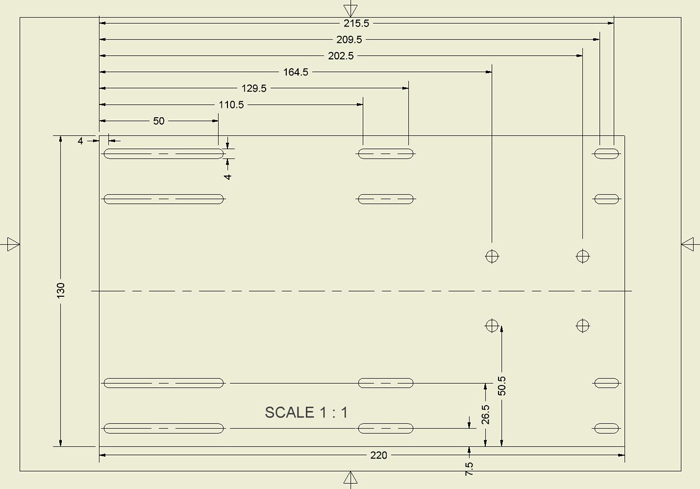
The second drawing is the design of the vertical base. The upper slot will allow you to adjust the tension on the caterpillar links, so the friction between the link and the wheels is high enough.
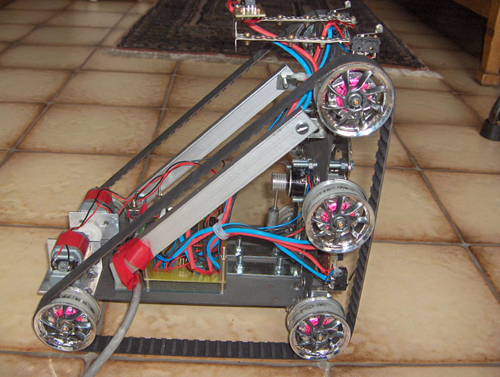
The following picture shows the beam that is used to strengthen the robot. Without it, the two base plates would be pulled towards each other as a result of the high tension on the caterpillar links. This would alter the position of the wheels and the distance between the magnets and the magnetic wall. We used a L-profile, since this type of profile guarantees a better resistance against buckling.