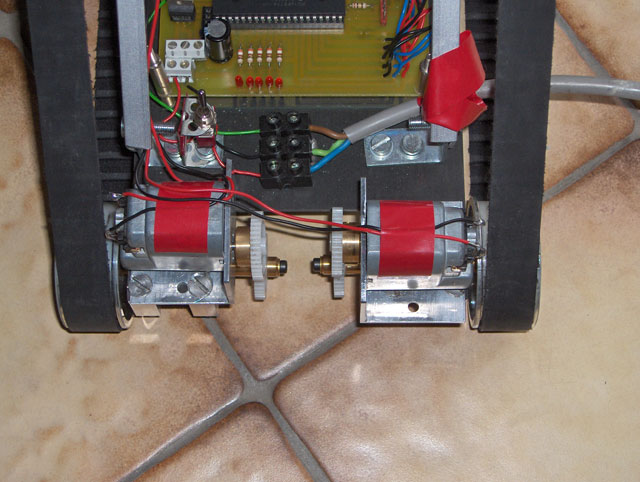
The two dc-engines drive the little robot. We used a transmission out of gears. This has several advantages. It saves room on your base, because you can position the engines above the shafts. You could have the same effect using a belt transmission, but this could have some slip, allowing the wheels to turn when they are not driven. This means that Vertigo would just roll down. We used a 1/1 ratio for the gears, but according to your engines, you can adjust this.
By using two engines, we don't need a steering system. So we keep the design and governing simple and robust. By governing both the engines separately, steering becomes an easy task.
The speed of the robot depends on the voltage delivered to the engines. The higher the voltage, the more power they supply. The engines are mounted on the back wheel on the horizontal base. The main reasons for that is the weight distribution and the fact that the angle the belt touches the wheel is the biggest, and so the risk for slip is minimized.
The gears are pretty hard to find. You'll probably need to dismantle some old equipment. We found ours in an old toy car, but old printers are an option too.