Voltage regulator
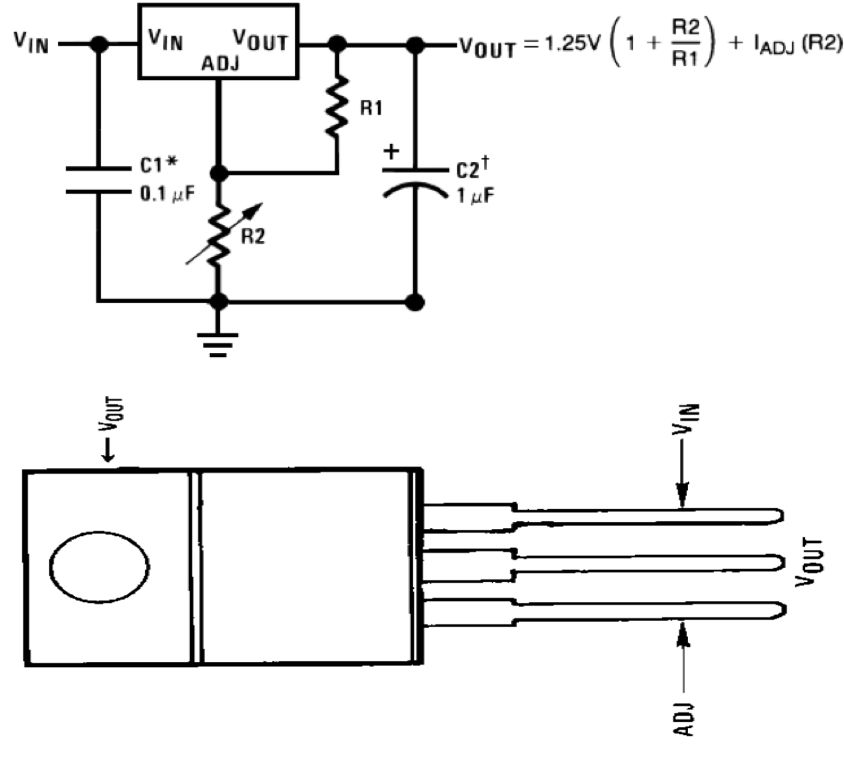
The critical component used is the LM338. By choosing R2/R1 equal to 3 one can easily regulate the voltage from 8 V to 5 V. The main purpose of the capacitors is to create a more stable output when for example the input is noisy or when the current drawn changes significantly. In this application the voltage drop due to the current coming from pin ADJ is negligible.
It is important to notice that this supply is a dissipative power supply. This means that the difference in voltage between the input and output multiplied by the output current will be dissipated into heat. This heat can be absorbed using a heat sink but since the dissipated power is not big (Pmax = 3 V*2 A= 6 W) and not everything works continuously, this is not necessary.