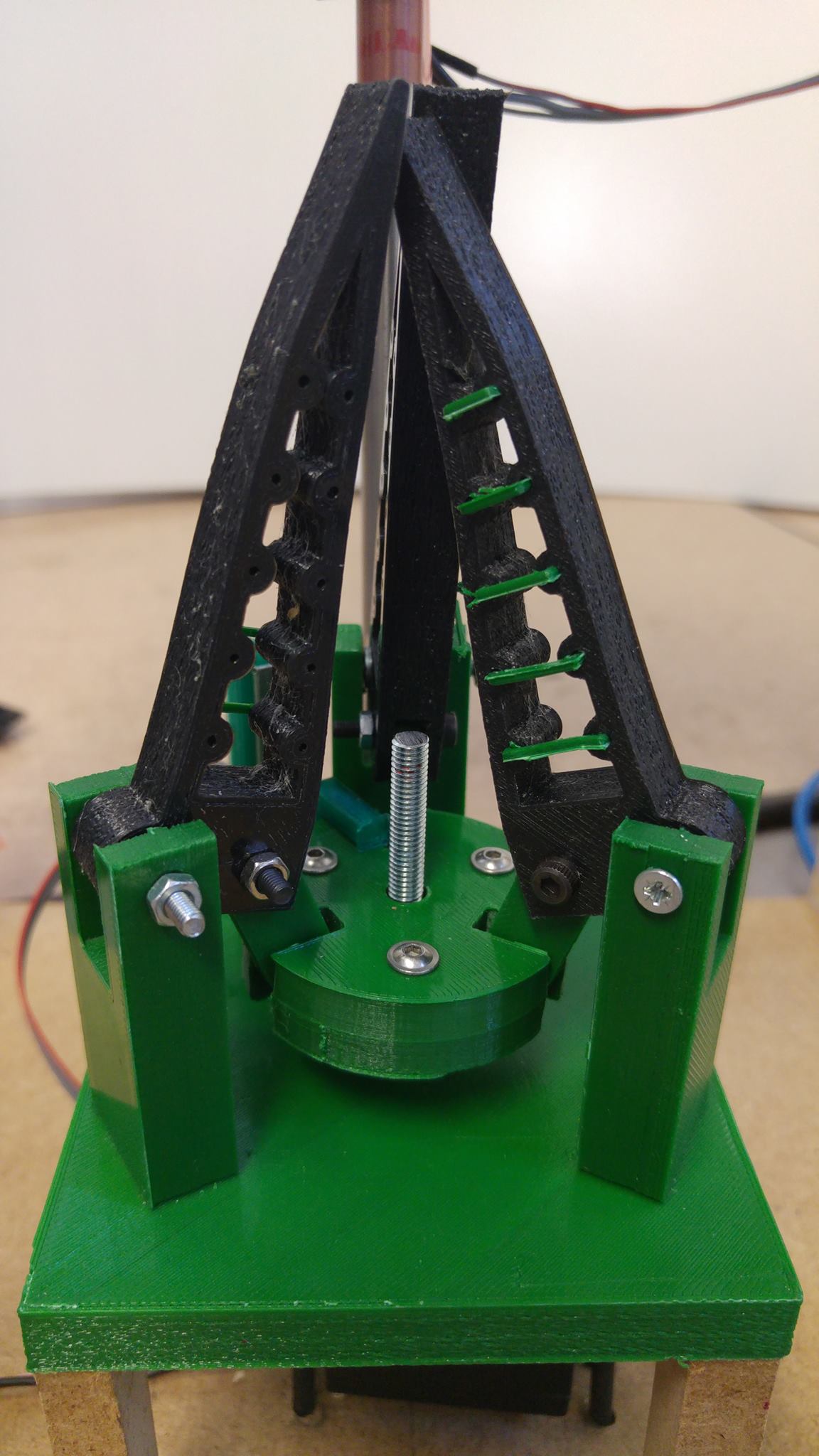
Flexible fingers
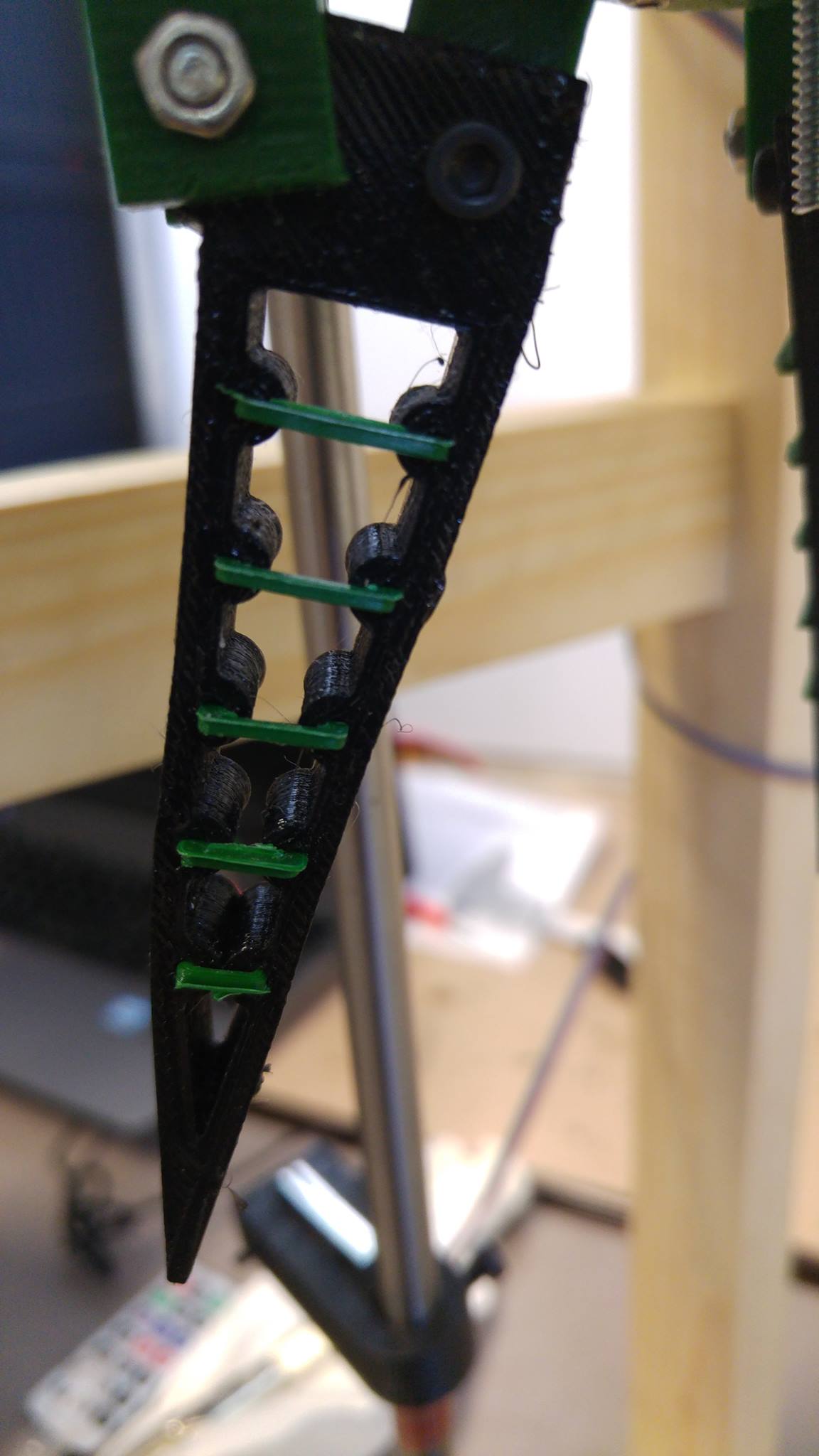
For the GripEgg, a gripper is developed to fetch an egg without breaking it. This means that a solution must be found regarding the existing grippers whose handle is too firm to perform this action. The most important part of the gripper to be designed is the set of fingers. The idea for the development of these fingers consists in the use of a flexible material. To make sure that the egg does not fall out of these fingers, some pieces with a high stiffness are added horizontally to the flexible material.