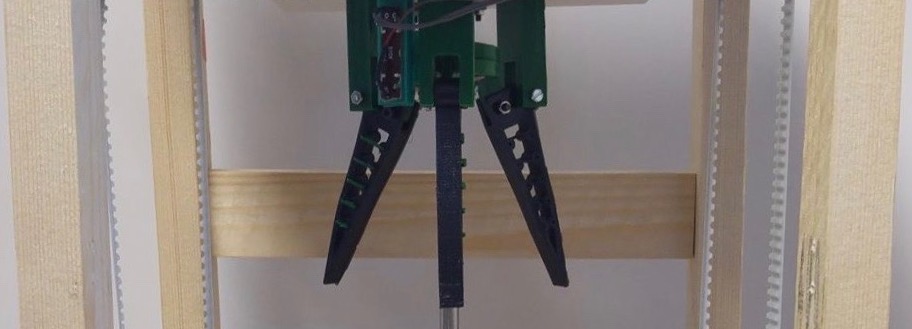
GripEgg demonstration
The final results of the program are shown in the video. The video shows both grippers holding the egg, the movement of the egg up and down, as well as the changing of the egg from the bottom gripper to the upper one and vice versa. All this is shown in a continuous program that consists of four stages.
This stage starts with the upper gripper open and the bottom gripper closed holding the egg. Here, the upper gripper moves down until it reaches the end stop, stopping the movement and the gripper starts to close. Once the upper gripper is half way in the closing, the bottom gripper starts opening. At the end of this stage the upper gripper is the one holding the egg.
In this stage the upper gripper moves the egg up until it reaches the end stop at the top.
On the third stage, the upper gripper starts to move down once again, this time while holding the egg. Once it reaches the bottom position the bottom gripper starts to close. When the closing is half way through the upper gripper starts to open. This stages finishes when the bottom gripper is gripping the egg once again.
In this stage the upper gripper moves up again, resetting the upper gripper to the starting position to be able to loop through the entire process from the beginning.
A remote control was added in order to control each function of the project separately.
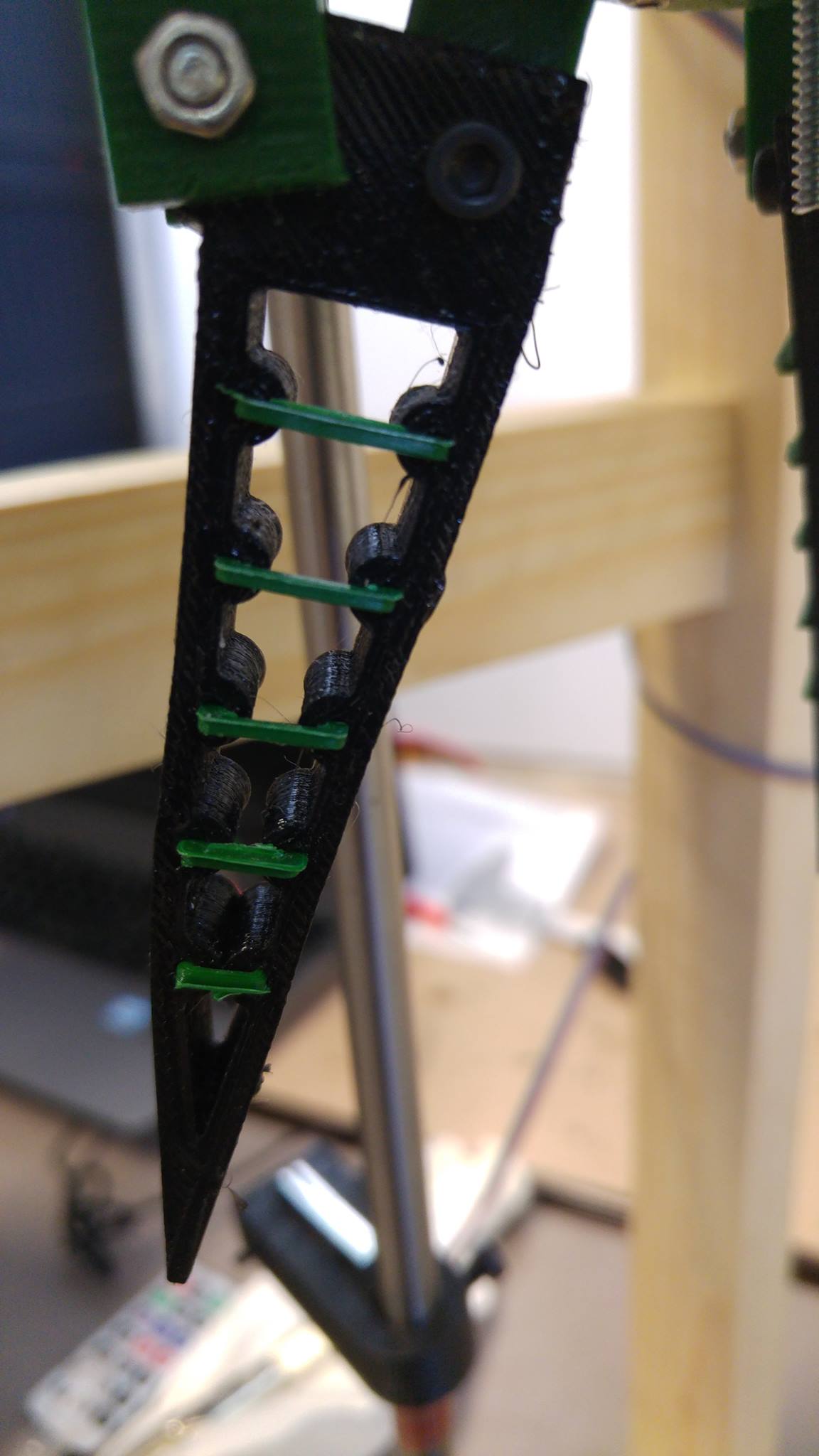
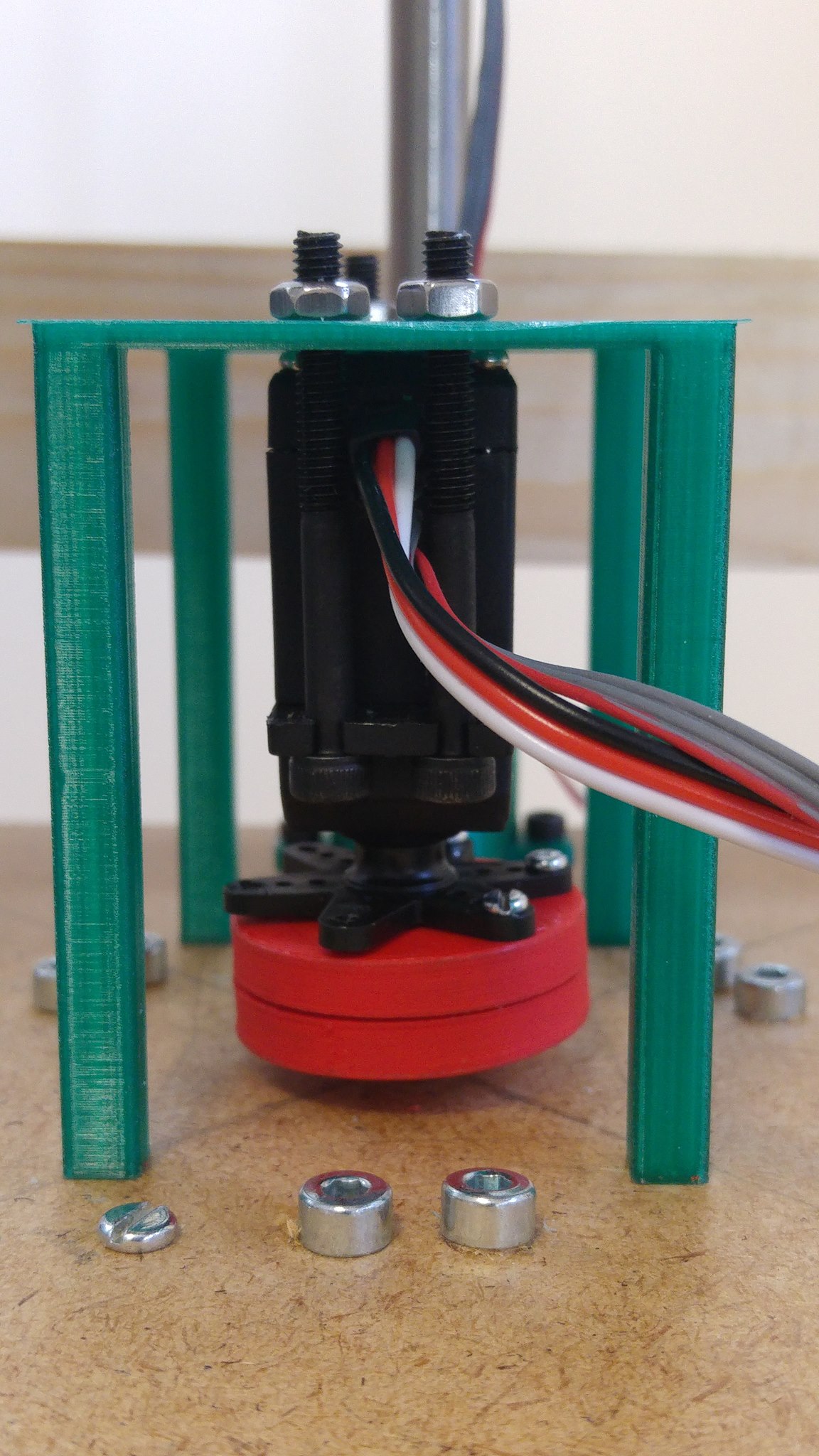
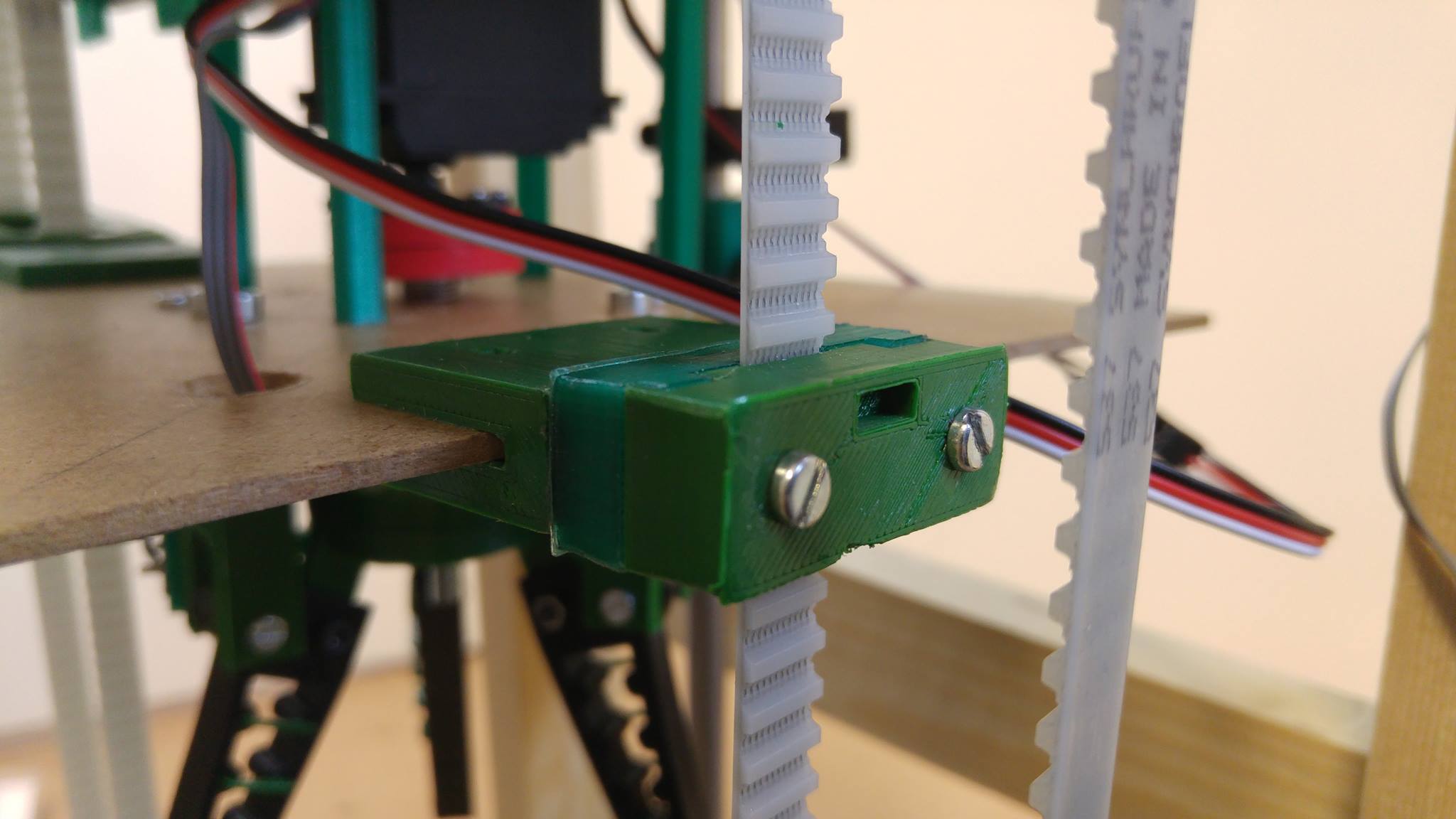
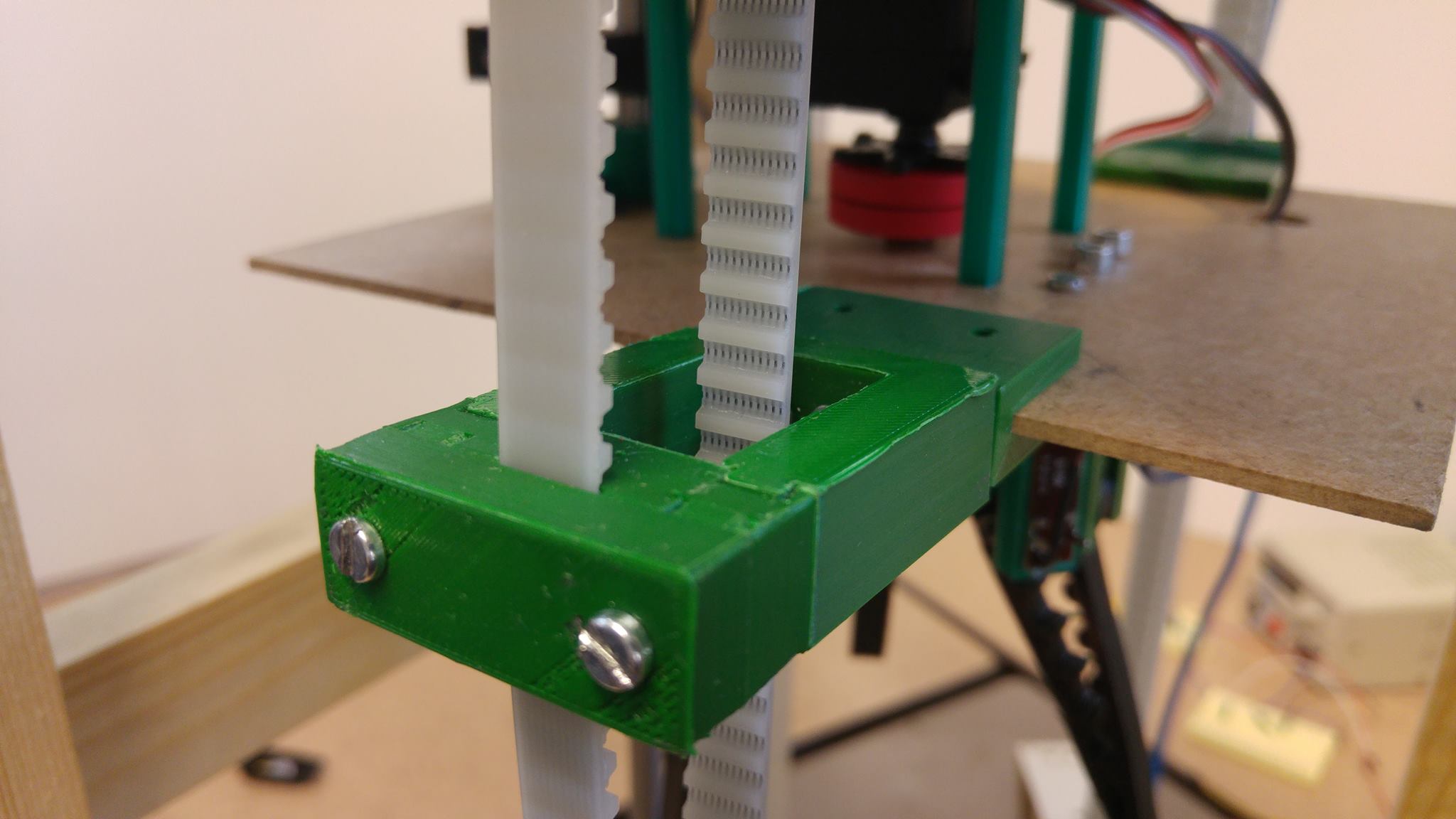
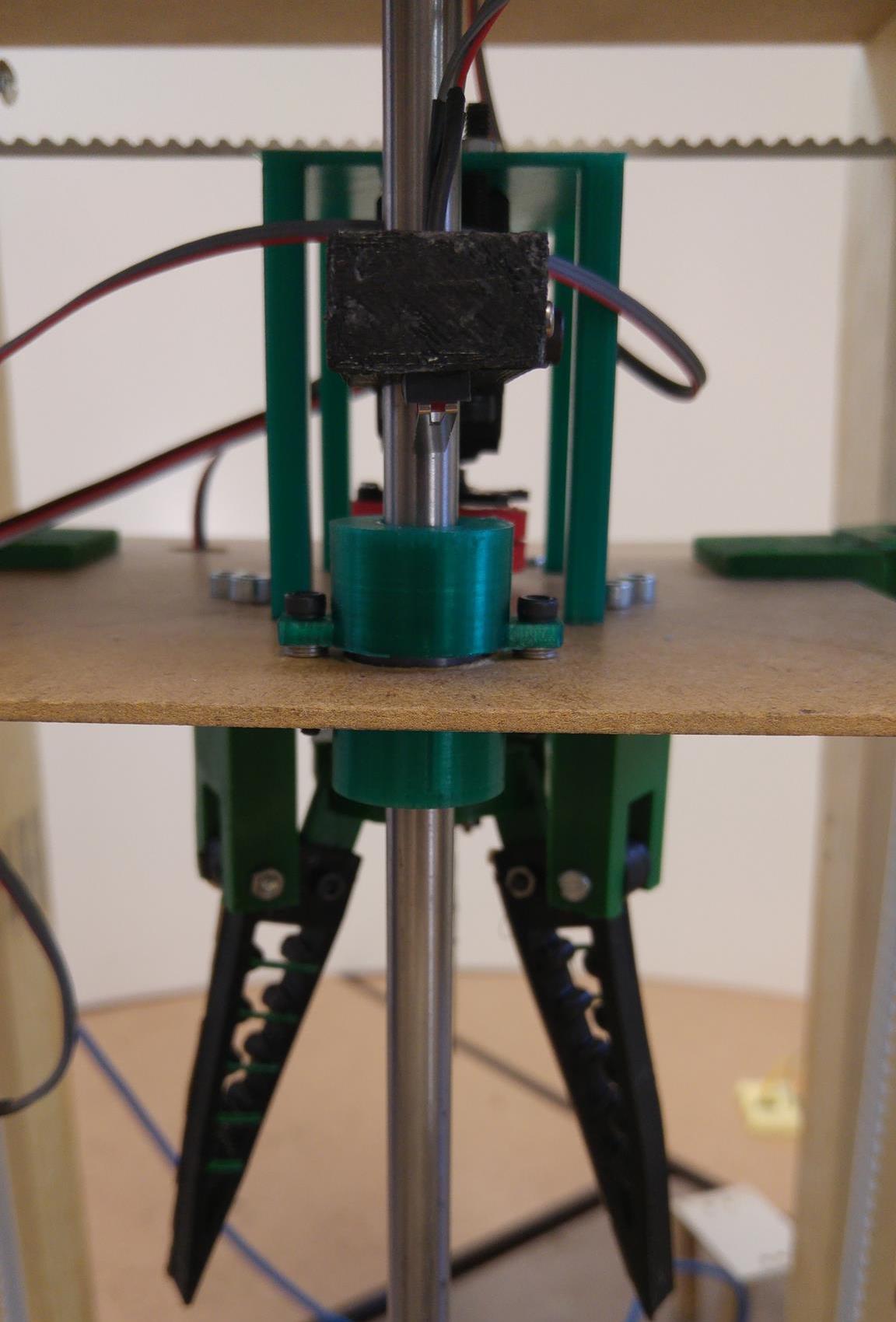
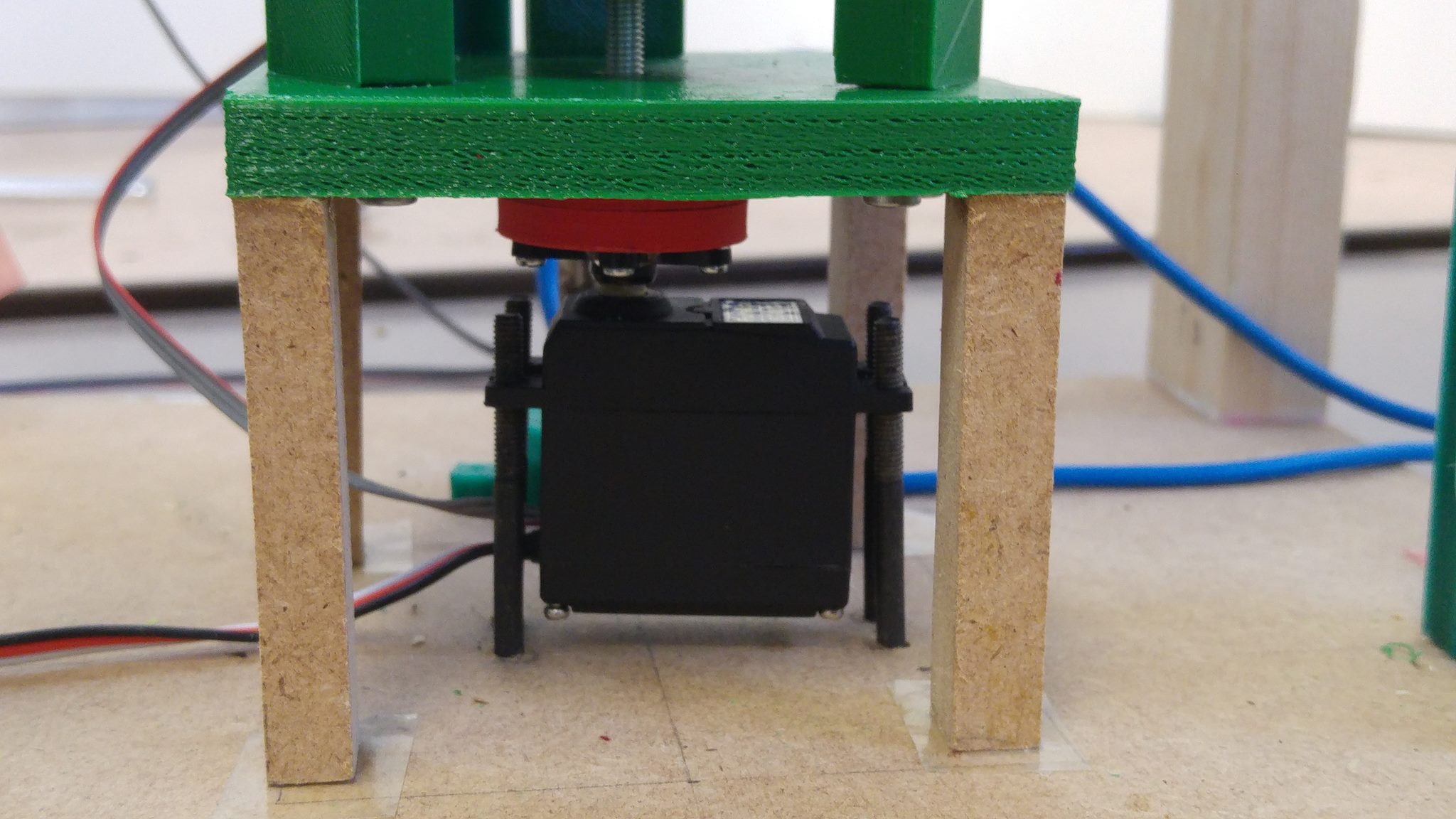
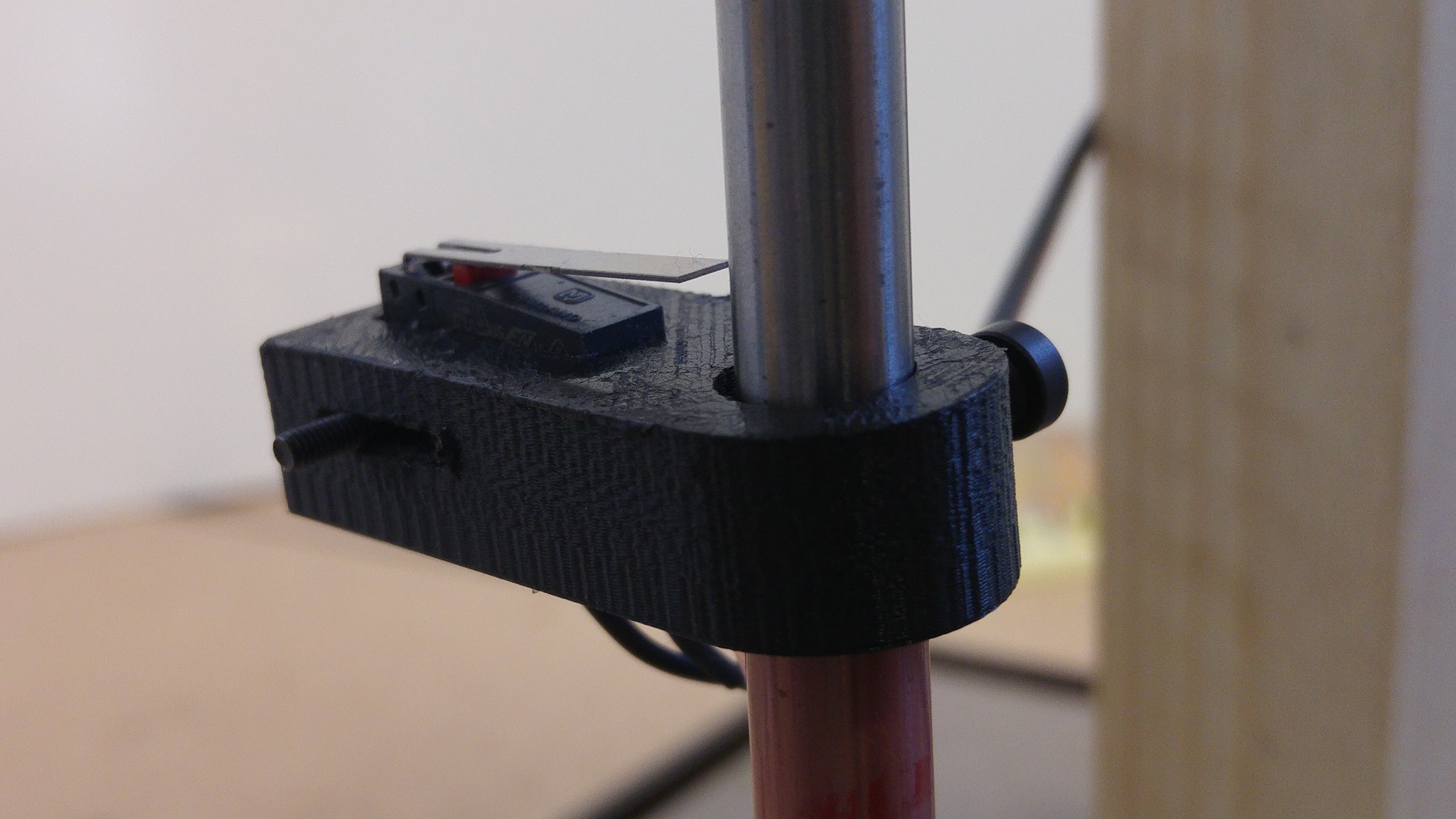
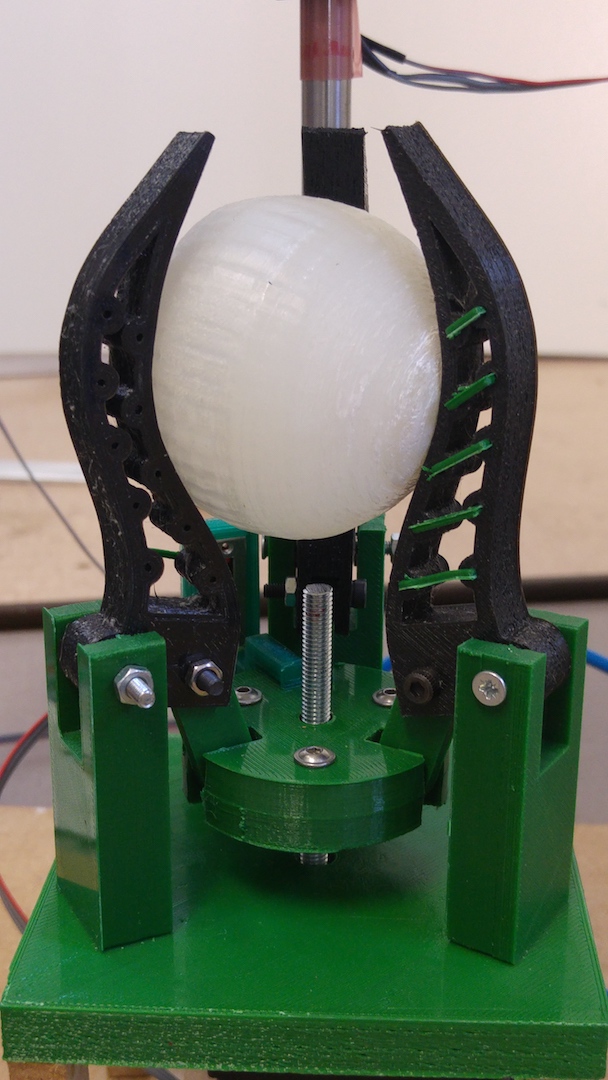
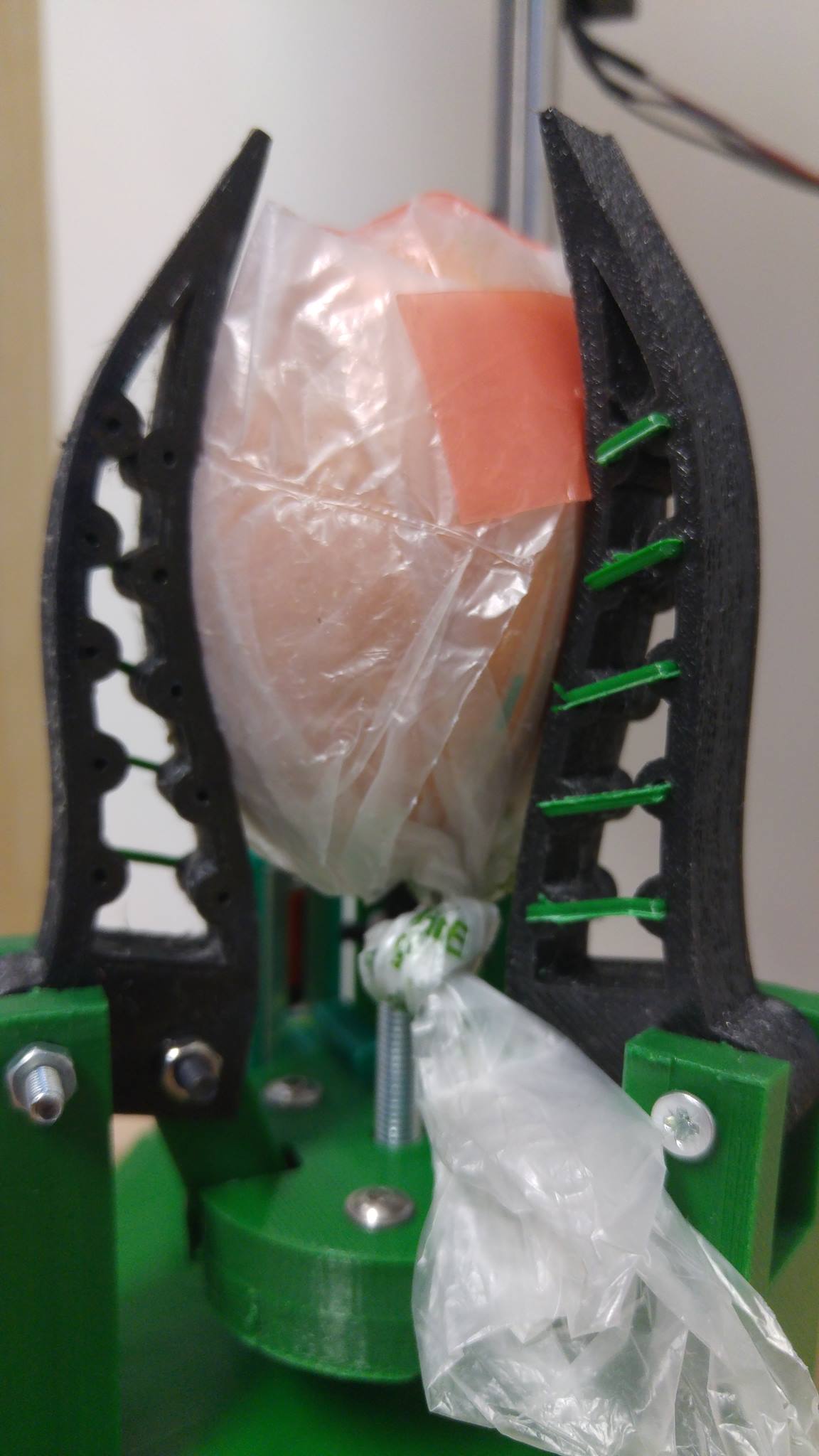
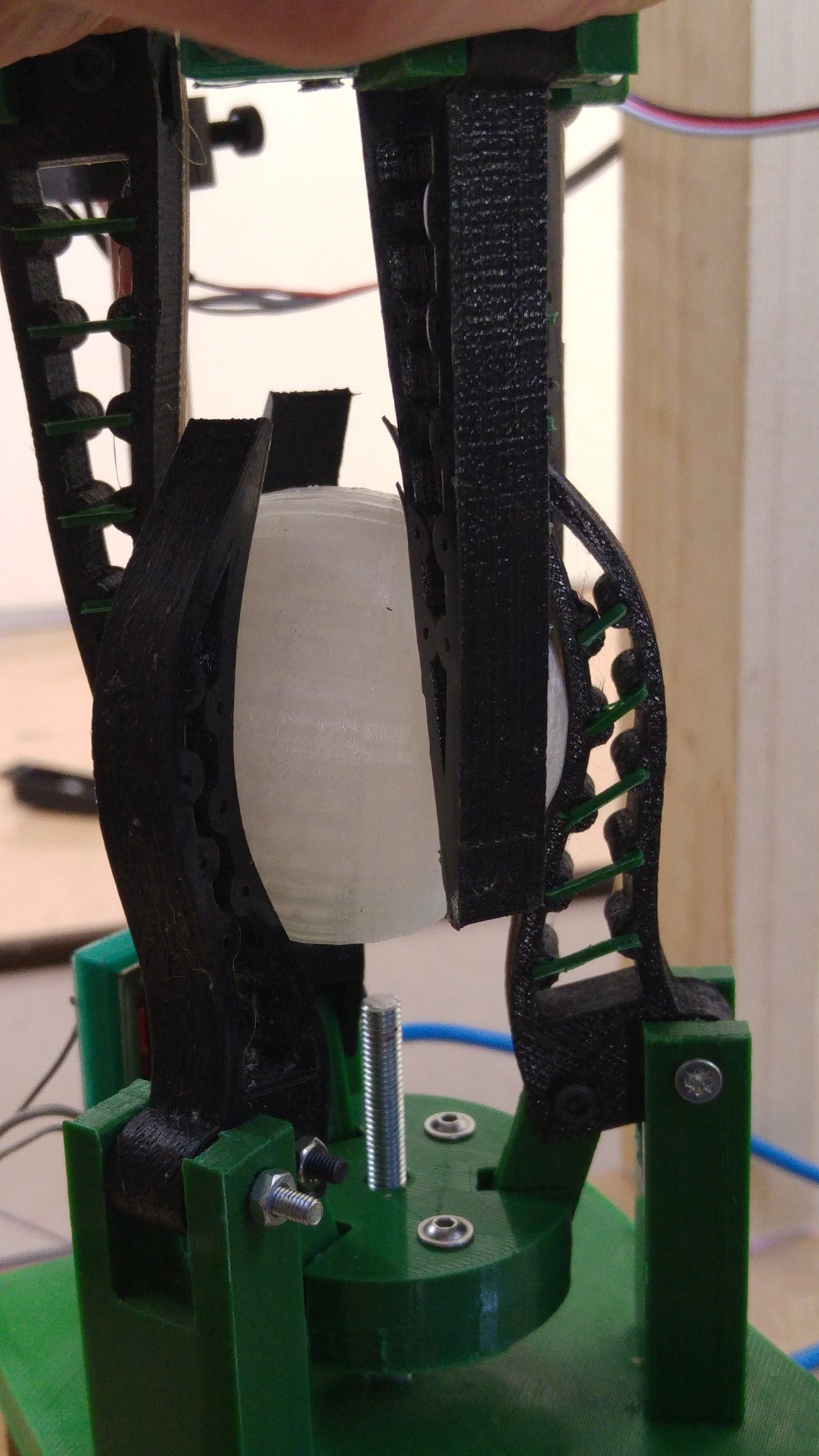
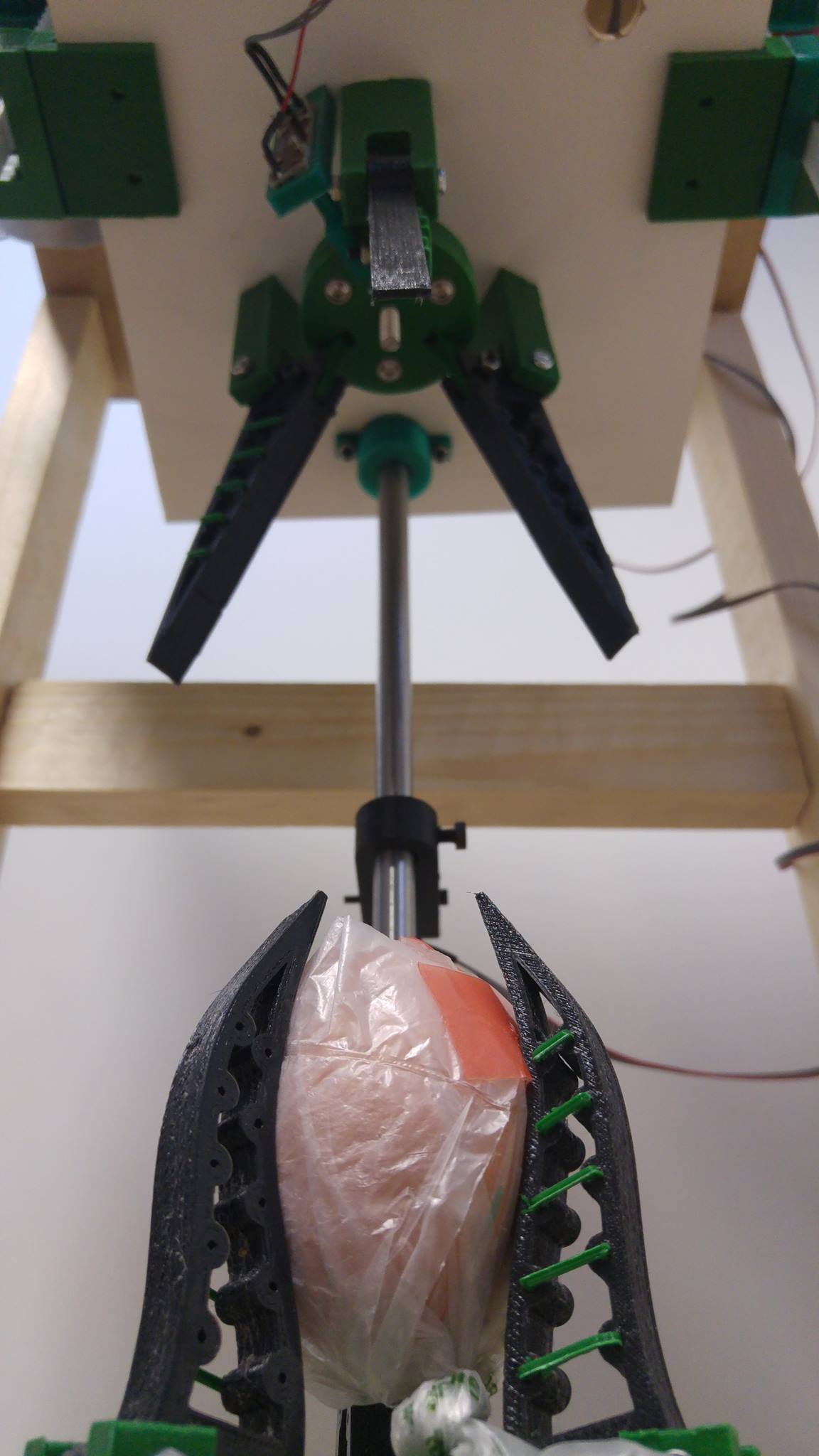
Gallery





Cost
| Name | Number | Price(€)/unit | Price(€) |
|---|---|---|---|
| Linear slide potentiometer 10kΩ | 2 | 2.82 | 5.64 |
| Endstop | 2 | 1.76 | 3.52 |
| Belt 575mm Length X 10mm Width | 1 | 10.89 | 10.89 |
| Belt 1070mm Length X 10mm Width | 2 | 16.81 | 33.62 |
| Linear bearing | 1 | 11.68 | 11.68 |
| Linear voltage regulator LM338 | 1 | 1.02 | 1.02 |
| M4 screws pack | 1 | 6.93 | 6.93 |
| 3D printing material : PLA | / | / | 50.00 |
| 3D printing material : NinjaFlex | / | / | 50.00 |
| Stepper CBA45-1101 | 1 | 20.00 | 20.00 |
| Servo Futaba s3003 | 2 | 11.52 | 23.04 |
| 216.34 | |||