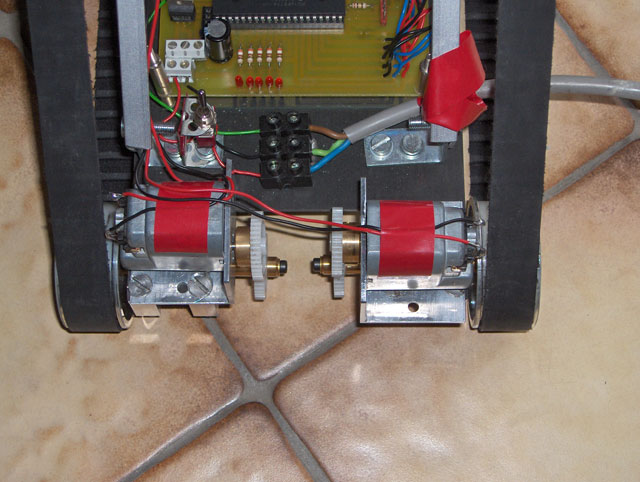
De DC-motor dient om het robotje aan te drijven. Dit gebeurt door middel van een tandwieloverbrenging waarvan de verhouding 1 op 1 is. Door gebruik te maken van tandwielen kan de breedte van het robotje compact gehouden worden, dit in tegenstelling tot een rechtstreekse bevestiging van de aandrijfas op de motor. Een riemoverbrenging kan niet gebruikt worden aangezien hier slip kan optreden waardoor het wieltje zou kunnen beginnen draaien zonder aangedreven te zijn. Door twee verschillende motortjes te gebruiken kan je werken zonder stuurinrichting en toch nog draaien.
Bij een DC-motor is het toerental afhankelijk van de spanning die wordt aangelegd en de aansturing is ook eenvoudig. Dit in tegenstelling tot een stappenmotor. Het motortje bevestig je op de horizontale grondplaat en drijft het achterste wiel aan. Het motortje staat op de horizontale plaat omwille van de gewichtsverdeling. Het achterste wiel wordt aangedreven omwille van het feit dat de rupsband een grote hoek rond dit wiel maakt waardoor de wrijving tussen wiel en rupsband groot is en dus geschikt is voor aandrijving.
De tandwielen zijn moeilijk te vinden. Je maakt het meeste kans door enkele afgedankte voorwerpen uit elkaar te halen. Je vindt ze in oude printers ed. Wij vonden de onze in een afgedankt telegeleid autootje