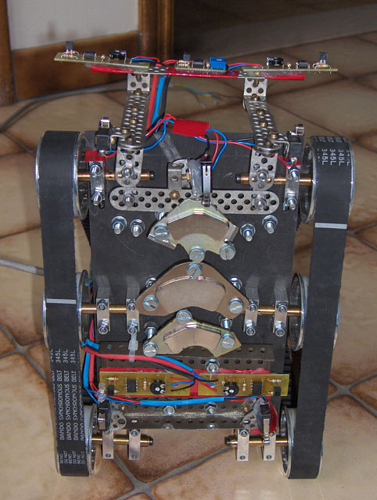
De sensoren bestaan uit lichtsensoren, microswitchen en een potentiometer. De schakelingen van deze sensoren en de aansturing worden uitgelegd in het onderdeel elektronisch ontwerp en software. Voor de positionering van de sensoren gebruik je meccano, dit is licht, aanpasbaar en eenvoudig te monteren.
De potentiometer
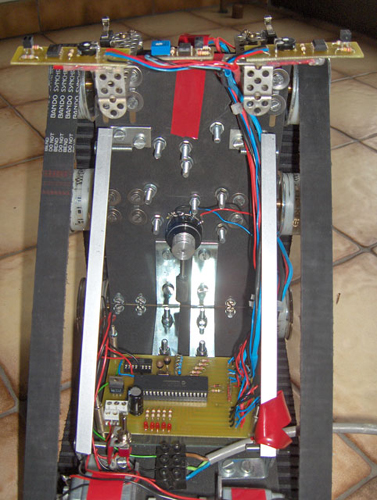
De potentiometer gebruik je om de positie van je robot te bepalen op de verticale wand. Hiermee kan de robot bepalen wat de bovenkant is en wat de onderkant is, doordat de spanning verandert door het draaien. De potentiometer bevestig je op de verticale grondplaat.
De lichtsensoren
De lichtsensoren gebruik je voor het detecteren van de objecten zonder dat er contact hoeft te zijn. Van deze sensoren heb je er vijf nodig. Twee worden gebruikt wanneer het robotje horizontaal rijdt en de overige drie worden gebruikt wanneer het robotje verticaal rijdt. Deze lichtsensoren zullen reageren indien er een voorwerp of de wand gedetecteerd wordt.
De microswitchen
Van deze switchen heb je er ook vijf nodig. Drie zijn bevestigd op het contactvlak met de verticale wand. Hierdoor kan bepaald worden of het robotje wel degelijk tegen de opstaande wand staat indien ze alle drie signaal geven.
De overige twee staan verticaal gericht en dienen om een balkje te detecteren of lage voorwerpen die niet gedetecteerd worden door de lichtsensoren.
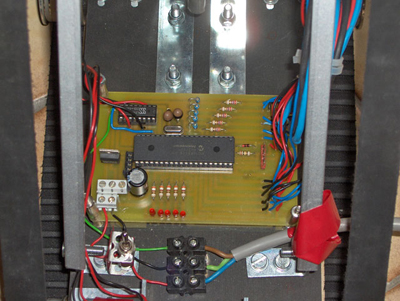
De printplaat
De printplaat is het centrale bordje van Vertigo. Op deze plaat komen alle verbindingen aan, dus zowel de voeding als de signalen afkomstig van microswitchen en lichtsensoren. De microcontroller die gemonteerd is op dit PCB-bordje zal dan aan de hand van het algoritme, wat besproken wordt onder software, de nodige beslissingen nemen om het robotje aan te sturen.
Het is ook altijd aangeraden om enkele ledjes te voorzien, dit zal het debuggen van de software aanzienlijk vergemakkelijken en zo ben je ook beter op de hoogte van wat je robotje aan het doen is.