To steer the robot, you will need to design a 'Printed Circuit Board'. We will go over the different components with you, explaining their function and circuit.
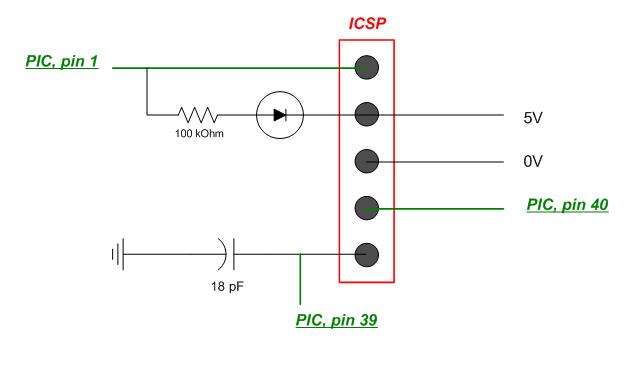
The ICSP connector is necessary to load the software. This connector consists of nothing more than 5 simple little pins. Each of those pins has its own function. With the help of the pcb of "Velleman", you can upload your software. When you have trouble uploading the software, you might want to throw out the 18pF capacity and try again.